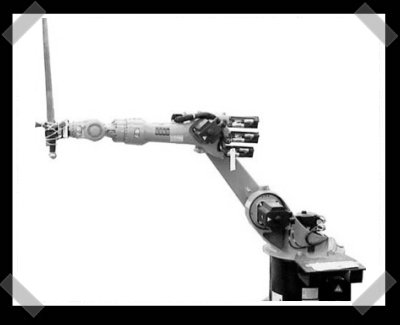
[Brian] sent in his Wiimote hacking project – he and his cohort used it to control an industrial sized robot arm. Then they armed it. Keep in mind that the sword is full size. [Aaron] ended up writing a basic pattern recognition program to get it to perform they way they wanted. Response time is a bit laggy, but not bad for a one-off project. I need my own industrial robot.




20 thoughts on “WiiBot – Armed And Pointy”
Leave a Reply
Please be kind and respectful to help make the comments section excellent. (Comment Policy)










this looks cool, first comment :)
extremly cool idea!
i would never had thought of useing an industrial sized arm tho..
second gen robot wars anyone?
I’ve been waiting for someone to do something like this! It’s a little slow on the reaction time, but it’s something.
kinda lame if u ask me, all this amounts to is patern recognition, and a huge industrial robot with preprogramed swings. If they had made the arm imitate the wiimotes actual motions that would’ve been truely interesting
I think we killed the server it is on…. Got H A D!
this isn’t a 1-1 translation of the movement of the remote; they explain the movement delay in their write-up. the computer waits until the remote has completed a movement (you hold down a button while you swing, then release it when you are finished), compares that to a set of stored movements, and replicates the closest stored movement. It’s interesting to note the stored movements and the wiimote movements were programmed separately…they decided what moves they wanted it to do (overhand, forehand, parry, etc) then one guy would ‘train’ his software to recognize how he would move the wiimote to execute that movement, and the other guy programmed the robot to do the movement. they could have used a figure 8 movement on the wiimote to do an overhand smash or a parry if they had wanted to. Cool project. i like their “parts list” (600lb crushed garnets as ballast anyone?)
heh one of my friends and I have been talking for a while about projects to do with the accelerometer in the hard drives of the thinkpad and macbooks… this would be pretty cool to do where you control the robot arm by physically moving the laptop. Maybe not very practical but cool anyhow.
I wants a little robot arm…
–neg
I don’t see why they couldn’t have done the exact wiimote movements- it might take a little extra software, but it would be worth it.
pattern reproduction is pretty common practice in industrial bots. the process of training, coding in a motion, and then linking the two is how all industral bots work, and it is relatively simple and robust software.
To actually make the bot replicate the wiimotes actual motions would be incredibly complex software. To place an end point in space based on wiimote data would involve a lot of complex geometry, if not a bit of calculus. and even if you can get the endpoint of the bot to stop at the related point that the wiimote stops, how it gets there is up for interpretation. compare your own arm to a robotic arm. joints dont work quite the same. for example, the bot’s elbow might be pointing up rather than own. like some sort of retard. ;)
mre:- You are bang on the money. Although most of this boils down to IK algorithms you can still end up with the arm in a crazy unnatural looking position. Getting a robot arm to move naturally is more complex than it initially seems.
My ghetto mini robot arm http://www.headfuzz.co.uk/?q=minirob
ginge.. you have been bookmarked.. thanks for the link.. ps, who was the original manufacturer of your arm? does it have any feedback on the axis?
The original manufacturer is a company in the UK called TecQuipment, but I used very little of the original robot arm. I managed to get a base and some motors out of TQ’s skip, but the rest is interpreted from the userguide I found in there also. From what I can tell the orig axis used a potentiometer, which is what I also used. It’s undergoing a rebuild at the moment using absolute encoders.
I bet simple movement replication would’t be too dauting to impement, the location of the wiimote in 3d space wouldn’t bee to hard to calculate based to the accelerations it returned and the direction of gravity (which could also be used to determine handle orientation). as #10 said though, making the arms actual contortion mimic a humans would be far trickier, all I can think of is to attach 3 axis accelerometers to each main segment of the users limb
this would be fun to play tennis against… or for sword training… but it would have a strenght advantage
Could you put the wiimote in the “hand” of the arm, and create a feedback motion due to the delay? Move it manually—> Moves arm —–> Wiimote moves —> Moves arm… etc… probably until it extended it’s range of motion!
Isn’t there other, more accessable Wii hacks out there? You guys should go find Liquid Ice.
It’s needs a remote control industrial robot to go with. to send to your neighbor ( whom you dislike) and scare them into leaving you alone.
Why not a wii-mote or potentiometer in the ARM of the arm, then just have it mimic the tilt of the wii-mote you hold?
probably not even possible, but it just popped into my head
Outstanding information and I like your frame of mind towards improving standards. Thanks for putting this material up. This is EXACTLY what I’ve been searching for. Always keep blogging. Looking forward to reading your future post.