
While I’m waiting for my last stepper motor, I’ve been pondering my electric motorcycle build. While eyeballing batteries, I ran across a really impressive human/electric recumbent bike project. [Bob Dold] built this for his M.S.M.E. Thesis project. The frame was built from bonded aluminum. The flat parts were cut via waterjet service, and the rest were machined by the college’s machine shop. The 1000w motor (and controller) came from a Schwinn X1000 electric scooter. Looks like a four link suspension (plus steering and shock linkages). Interestingly, he’s using some USB data loggers for voltage and current(with a shunt) and combining it with GPS data to track real world performance.
Month: April 2007
Capacitive Dance Pad

One of the ideas that’s been floating around my How-To bin for a couple of years is an under carpet zone switch dance pad. [sprite_tm] beat me to it in late 2006, and did it even better. He was using a QT160 chip – a nifty six channel capacitive touch sensor to make touch switches. Instead, he used an Atmel to duplicate the technology. He was able to place foil panels below his carpet. Step on one and it acts like you just closed a switch. The QT160 is now available, but the atmel he used is actually cheaper.
Brute Forcing VM Pin Codes

er, [-] sent in this little project. War-dialing is classic. The Scanit is designed for VM wardialing from a cell phone. The interface is a simple sound card to cell phone device made from a cheap car kit.. A laptop does the rest of the work. Apparently the nokia they used responds to sound based send/end commands. (DTMF is easy) I’d like to see a schematic and some source code, but nothing in the project is too terribly difficult.
Adding USB To A Cheap Linux Router
![]()
[sprite_tm] usually sends this stuff in, but I discovered that he took some time to hack on a Sweex router. The CPU happens to have an on-board usb host controller, so he added a few components. Now the router can support memory sticks, or possibly become a USB print server. (I can’t say for sure since I haven’t checked out the software myself)
Update: the project was linked in a comment a while back, but we never gave it the attention it deserved. Enjoy.
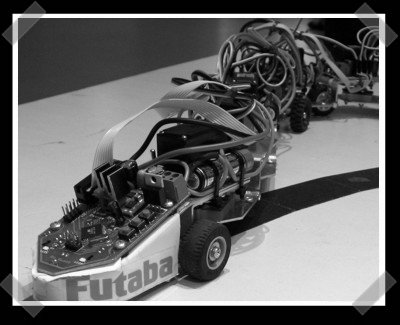
SickSack: ATMega Servo Snake Robot
[Lars] sent in this sweet snake robot that he and [Aske] built for the DTU Robocup. I’ve seen snake bots before, but I like the concept and the clean electronic design. They used a single AtMega32 controller to generate PWM signals for each of the eight servos, and used a very interesting DC-DC buck converter that’s capable of delivering 16 amps.
For the curious, the bot won the best design and effects award at the competition.
From NES Console To Dedicated Arcade Emulator

[Jesse] sent in this one. [Raphaël] decided to take NES practice to a new level by dedicating a NES console to run the arcade version full time. This is more than merely a ROM loading exercise, there are several differences between the NES and it’s dedicated arcade sibling, the Unisys VS. Memory was upgrade, several io pins are tapped and brought out for manual access via the newly added controls up front. At the very least, it’s a nice exercise in schematic reading. Given the mods and a few arcade accessories, you could reconstruct your own fully functional arcade machine.
How-To: Make Your Own Xbox 360 Laptop (part 1)

Sure, maybe you’re sick of hearing about [Ben]’s work, but he’s finally giving up the goods on building that Xbox 360 laptop. It’s not your average slap it in a case and splinch on a screen project, so you’ll just have to deal with a few more posts as he pumps out this series.
To console you people who can’t stand the major pc board redecorating that’s [Ben]’s trademark, [kiwisaft] sent along this unique use for the ol’ laser toner transfer trick.
The ball point pin dot matrix printer reminded [Tesladownunder] was reminded of this funky servo based plotteroriginally built for the dearly departed vic20.









