
Uber-geek [James McLurkin] was in Austin recently demoing his robot swarm. He’s on tour with EDA Tech Forum. [McLurkin] has multiple degrees from the MIT AI lab and worked at iRobot for a couple of years. Lately, he has been working on distributed robot computing: robot swarms.
[McLurkin] was an entertaining speaker and had an interesting view of robotics. He is optimistic that robot parts will become more modular, so it will be easier to build them, and more importantly, faster to design them.
Some quotes:
- “There’s more sensors in a cockroach’s butt than any robot”
- “12 engineer years to design, 45 minutes to build”
- “If it can break your ankle, it’s a real [rc] car.”
His swarm (pictured above) is made up of over a hundred small identical bots, but he only brought about a dozen with him. The demo was still quite impressive. He had the robots spread out, clump together, play follow the leader and circle the wagons. Each behavior had a very simple rule behind it. To spread out, for example, each robot tries to move away from it’s nearest neighbor. The really fun part was when he had the robots perform a physical bubble sort. The rule for this was that each bot tried to put a higher-id bot on one side and a lower-id bot on the other. After a minute or so of bumping around the bots all lined up in id order.

I was interested in the details of the robot itself. Here’s a picture with the parts labeled. 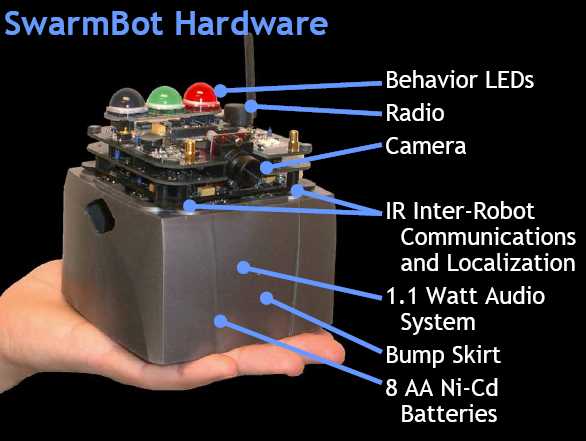
Each robot has a unique ID number. They communicate with each other via IR and have sensors so that they can tell which direction and how far away the other bots are. The lights on top are just indicators so you can tell what the bots are doing. A mesh network is rebuilt several times a second, creating a directed graph from the ‘leader’ (which can be any arbitrary bot) that connects to each bot in the swarm. Any bot can act as a repeater, relaying instructions to bots that can’t talk to the leader directly.
Robot swarms are not a new idea: they’ve been floating around as concepts for many years. However, [McLurkin] was one of the first to actually build and program a large swarm (at one time he held the record for the largest robot swarm in the world). The idea caught on with researchers and today there’s even an open source robot swarm project. If you’re not up to building a whole bunch of robots, there are also simulators.
After the demo, we asked [McLurkin] about the cost of the robots. He said he didn’t know for sure, but estimated at least $2000 per bot. When we commented that “that’s a lot of money for 100 bots”, he pointed out that compared to the $20K+ that research robots can go for, it’s a bargain. He also said “This whole new world of hobby robotics just didn’t exist in the 90’s”. For robots to be deployed in swarms of hundreds or even thousands, in situations where they can get damaged or lost (search and rescue, military exercises) the cost will need to drop dramatically.
Here he is packing up his robot swarm. After the demo, we half expected them to pack themselves – no, they don’t. 
For more info on robot swarms, their inspiration and possible uses take a look at [McLurkin]’s web site.














Any hope of seeing video of the physical bubble sort? I am certain that it would be quite entertaining…
Joey: yep, on the website — http://people.csail.mit.edu/jamesm/swarm.php#videos
He’s a great speaker. I saw him at one of the SD West 2008 keynotes, and he had about 15 of the robots with him. He gave an impressive little demo (likely the same speech you saw,) and it was probably the most entertaining lecture of the week.
I shot a few minutes of crappy video with my phone, but it proved to be useless.
If any of you get the chance to see him live, it’s worth it. A hacker with a personality!
Thank you allot, for sharing the great post!
Here, I found a youtube video about xbox live hacks- that I would like to share: xbox Live hacks…
but seriously, great post and thanks so much !!
I look forward to your next article !!
;)