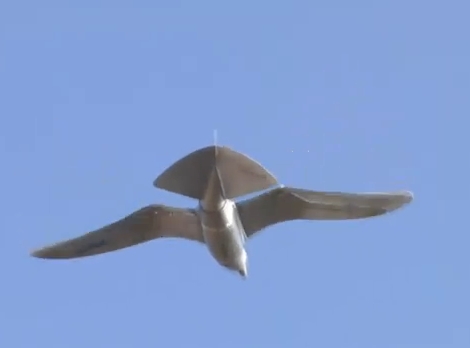
This really gives a lifelike look to the eye in the sky. In case you were worried that every part of your life wasn’t being recorded by a surveillance camera, the Festo Bionic Learning Network has come up with a drone that will be hard to discern from the wildlife.
Watch the video after the break. We’re not 100% certain that it’s not fake, but it looks real enough (the mark of a truly amazing design). You’ll see the robo-bird flapping away both from a fixed point on the ground, and from a camera view behind the head of the device. It propels itself both by flapping and rotating the wings and is capable of taking off, flying, and landing autonomously.
It’s bigger than the hummingbird drone that was developed for DARPA, but we think that it sticks out less when caught at a glance. No word on the intended use for the device, but we’re sure that some of you are enjoying the nostalgia of the mechanical owl from Clash of the Titans, and that’s why we want one.
Continue reading “Robotic Bird Flaps Away Last Bits Of Privacy”
















