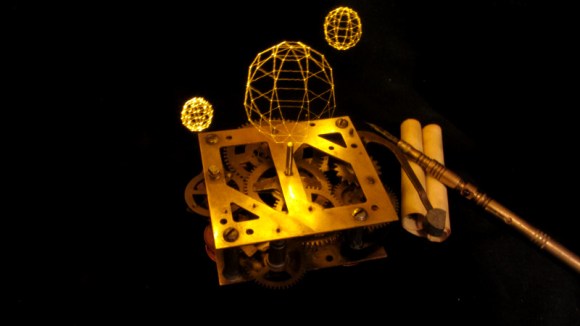
The points of those geometric shapes line up perfectly thanks to the delta robot arm controlling the light source. The source is a simple LED that can be switched on and off as it moves. A camera is set up in a dark room to keep the shutter open while the arm moves. We’re assuming that all of the light for the stationary objects in this image comes from the LED as well.
[Sick Sad] built the delta bot for just for this purpose. Check out the video below to see, and perhaps more importantly hear, the thing in motion. Seriously, the whine of the stepper motors is pretty awesome on this one.
The delta concept uses a central head on three arms angled down from above. If the LED is also pointed down it won’t light up the hardware and that’s why it doesn’t show up in the image. We’ve seen similar accuracy when using this style of machine for 3D printing. But if you don’t want to build a complicated machine you can try this out with a simple string plotter.














OMG… that thing sounds BEAUTIFUL! I think I broke the replay button…
Thank you, it only began to sound so good once the inverse kinematics were implemented directly on the microcontoller, previously they were done on the computer and effectively bit-banged to the machine over serial which resulted in imperfect delays between steps and a much rougher sound. I was also able to debug the kinematics partly from the sound of the machine, it would often just sound “wrong” when I’d made a mistake.
God delta robots are sexy.
Yeah they are… I’m building a Rostock Delta (3d printer) at home. Can’t wait to see it make it’s first movements.
Nice. If I could afford a 3d printer I’d totally want a delta one instead of the standard XY ones.
Very cool, the next object that should be ‘rendered’ in such a way is IMHO the original Tron Light Cycle in its wireframe form.
Tron, maybe.
Elite – definitely :-)
(hmm, one could create a very *very* slow refresh-rate version of the game using this process!)
If you stick to fixed point math then you can use standard controllers like an Arduino Mega 256 + RAMPS. Full floating point is probably overkill.
Agreed, If I can get time that’s definitely something I want to look into. It irks me to use the STM32F4 Discovery board because as nice and cheap as it is I’d rather use open hardware.
Well you could just use open hardware stm32F4 boards like the ones from Olimex.
Nice! Some place on the Interwebz I saw light painting used to visualize EMF. (Here is an example: http://ciid.dk/education/portfolio/idp13/courses/experimental-imaging/projects/visualising-electromagnetic-fields/)
That got me to thinking about pairing that with, well, what you built, a light painting robot. It could be awesome!
totally agree that would be quite rad. I’m even sure a halls effect sensor will show something cool in the magnetic spectrum too. If possible, if the sensor is a vector, then draw a many arrows in free space too.
Or you could use,
radio emission (via frequency counters)…
gases (gas sensor)
pressure (strain sensor)
air pressure (air pressure sensor)
humidity (humidity sensor)
magnetic (magnetic sensor)
I recently built a Rostock Max. Designed a part yesterday evening. Fell asleep watching it print. Woke up to a finished part this morning at 5am. Life is good.