Telescope mounts connected to computers and stepper motors have been available to the amateur astronomer for a long time, and for good reason, too. With just the press of a button, any telescope can pan over to the outer planets, nebula, or comets. Even if a goto command isn’t your thing, a simple clock drive is a wonderful thing to have. As with any piece of professional equipment, hackers will want to make their own version, and thus the openDrive project was born. It’s a project to make an open source telescope controller.
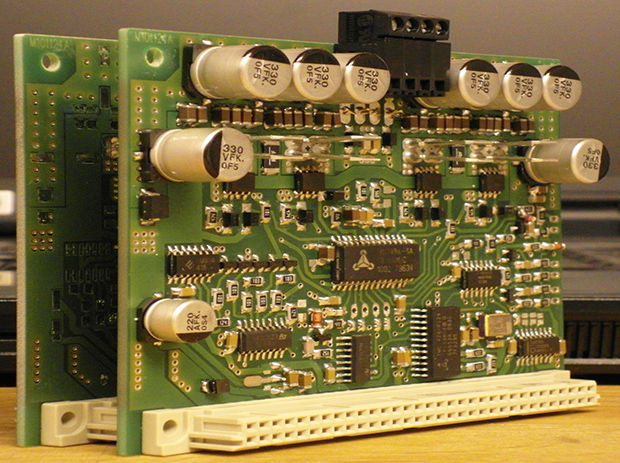
Right now, the project is modular, with power supply boards, a display board, motor driver, an IO board (for dew heaters and the like), and a hand-held controller. There’s an openDrive forum that’s fairly active covering both hardware and software. If you’re looking for a project to help you peer into the heavens, this is the one for you. If telescope upgrades aren’t enough to quench your astronomical thirst you could go full out with a backyard observatory build.
Danke [Håken] for the tip.














I suppose this could also be adapted for solar panel tracking(and solar panel banks) provided you had ephemeris for the sun and geolocation data… and if the panels had an equatorial mount.
For solar, it wouldn’t need to be equatorial mounted. A GEM would only need a correct RPM motor to track.
Oooo. Very cool. I have been thinking of building a GEM mount for my LX200 for astrophotography. This might be nice to drive it. Though it would be nice to see a servo control option too. Or at least step/dir out so I can drive servo drives that way.
why not use a 3d printer board? there are widely available, and the only thing needed is an alternative firmware. SD Card, LCD, stepper boards, digital inputs, even temperature sensors are there….
I am not sure what the specs of the latest and greatest 3d printer boards is but they are trying for stuff like 64 micro step and a dc/dc converter on board to kick up the voltage for the stepper drives and up to 4 drives. There is also the ST4 interface for an auto guider (nothing special really, just 4 input bits) but the programming may be a little more complicated as the inputs need to alter the trajectory of the scope.
Linistepper is another option for really small microstepping. It’s cheap, easy to build, and preforms well. I bought one of his other boards but I’ve heard great things about his (Massminds) Linistepper boards.
Offering a high number of microsteps in a motor controller makes me wonder if the designer of the controller knows what he is doing:
“Simply stated, taking a microstep does not mean the motor will actually move! And if reversing direction is desired a whopping number of microsteps may be needed before movement occurs. That’s because the motor shaft torque must be decremented from whatever positive value it has to a negative value that will have sufficient torque to cause motion in the negative direction.” [http://www.micromo.com/microstepping-myths-and-realities.aspx]
“Although some microstepping controllers offer hundreds of intermediate positions between steps, it is worth noting that microstepping does not generally offer great precision, both because of linearity problems and because of the effects of static friction.” [http://homepage.cs.uiowa.edu/~jones/step/micro.html]
Just had this same discussion on another forum. Microstepping increases resolution but it is not accurate. If you need high resolution use belting or gearing to drive the load. Or use a servo motor, my favorite choice.
servo motor are what celestron uses
Same with meade and most other decent controllers.
What is the name of this white board-to-board connector?
Some weird DIN 41612 connector. The key word here is ‘backplane’
If this isn’t it, it’s close.
Thank you
Stacked boards make it very hard to reach things with a scope probe. I’d prefer a single bigger board, and if that’s not desirable, maybe a few boards connected with a serial bus.
Designed using Eagle :/
They should have used Kicad.
I hope that the pcb boards with the SMD’s soldered will be avaible for sale,- or avaible 100% soldered and tested.
To bad that the forum is in German.
The motor driver board is working, there are some demos on YouTube, but the software does not work.
Some ideas have been tossed around, a few things even tried out – the Carambola MIPS-based board looks very promising, with WiFi and running the OpenWRT distro, some ARM-based development boards like the EKC-LM3S6965 with FreeRTOS and the likes were evaluated as well.
There has not been any activity on the project for 3 months due to the fact that it has a low number of members,hwo is busy with their day jobs.So,hopefully there are somebody out there who can help.
Some of the hardware/software demands can be guesstimated if this is studied:
http://opendrive.gizmor.org/forum/viewtopic.php?f=5&t=285
A very complex board with multiple functions for telescope technology. Very nice illustration.