Ideally, technology is supposed to enhance our lives. [Shane and Eileen], two seniors at Cornell have found a great way to enhance the lives of visually impaired individuals with their acoustic wayfinding device. In brainstorming for their final project, [Shane and Eileen] were inspired by this Hackaday post about robots as viable replacements for guide dogs. They sought to provide wearable, hands-free guidance and detection of (primarily) indoor obstacles—namely chairs, benches, and other inanimate objects below eye level.
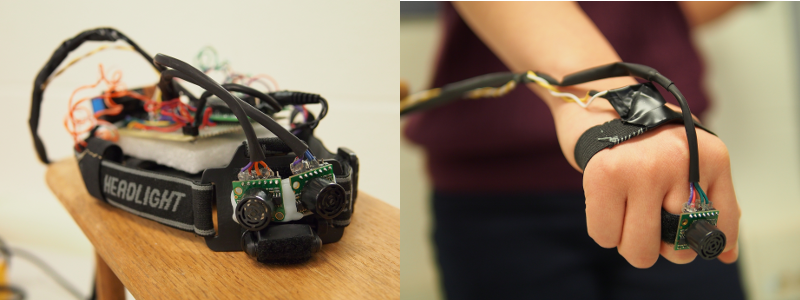
The wayfinder comprises two systems working in tandem: a head-mounted navigation unit and a tactile sensor worn on the user’s finger. Both systems use Maxbotix LV-MaxSonar-EZ0 ultrasonic rangefinder modules to detect obstacles and vibrating mini-disc motors to provide haptic feedback at speeds proportionate to the user’s distance from an obstacle.
The head unit uses two rangefinders and two vibrating motors. Together, the rangefinders have a field of view of about 120 degrees and are capable of detecting obstacles up to 6.45 meters away. The tactile sensor comprises one rangefinder and motor and is used in a manner similar to a Hoover cane. The user sweeps their hand to detect objects that would likely be out of the range of the head unit. Both parts are ergonomic and size-adjustable.
At power up, [Shane and Eileen]’s software performs a calibration of the tactile sensor to determine the distance threshold in conjunction with the user’s height. They’ve used an ATMega 1284 to drive the system, and handled real-time task scheduling between the two subsystems with the TinyRealTime kernel. A full demonstration video is embedded after the break.
[thanks Shane and Eileen]














Can i buy one ready to use ?
Probably not, but their write up is exhaustive and includes a bill of materials. They built it for just under $100.
I MAY BE READY TO BUY IT FOR ANY AMOUNT I LIKD IT MUCH??
Brilliant. With some work and a few revisions I really think this could shrink in size and be extremely useful to people.
There has been a similar one on HaD before, maybe they have some ready to sell.
I built one of these over 30 years ago for “Blind Fury” (sorry Babe!)
It was all done with 555’s and 4000 series CMOS gates., feedback is a piezeo element flush against her palm, the ultrasonic transducers are between her fingers.
Version 2 had a neato brass knuckle duster for those ass hats that think it’s funny to trip the blind girl.
Best of all she is still using it!
You should submit a writeup to HaD with pics if you have any. It sounds interesting :)
lol
scanning 40 years worth of notebooks is definitely on my “gunna” list!
Thing is I’m REALLY bad with notebooks!
Any excuse to start a new one!
And there are just so MANY of them!!!!
In this economy, there are probably people with extra time who would be very willing to help out with that kind of archiving. Hell, if you’re in the Houston area, I’d be curious at least.
You should at least digitize them using a high resolution camera or scanner.
That way you could categorize them by year and project.
Doing so would even allow you to sell your projects as tutorials for those who want to learn the skills.
2 problems,
“decoding” my handwriting and most of my circuits are drawn in pencil!
The pencil circuits don’t copy very well and even I have trouble reading some of my notes, waaay too much coffee and/or Coke @ 4am!
I’m not sure how relevant some of the stuff is, does anyone have interest in analogue stuff these days? i.e Lunar Lander done with 741’s, switches, pots and meters.
That and I LOVE building stuff from 7400 series, lots and lots of 7400 chips!
Those original Pong and Tank had a bad influence on my young mind!
;-)
>>>
“decoding” my handwriting and most of my circuits are drawn in pencil!
>>>
I have that same problem if I use cursive which lead me to stop using it about 20 years ago or so.
>>>
The pencil circuits don’t copy very well and even I have trouble reading some of my notes, waaay too much coffee and/or Coke @ 4am!
>>
While a scanner may have a hard time with the pencil circuits, a 12 mega-pixel or above High resolution digital camera won’t. It will take a picture of what it sees. So if the line can be seen with human eyes, the camera will see it to and put it in the picture.
I had this idea 5 years ago and worked with a few blind people working in my company. Good to see you also had this idea and created it. I never finished the project.
I would hate to see these guys patent it and sell it for big bucks to some medical company and sell it overpriced to blind folks.
If that happens I would love to see you sue them based on prior art. I would even be happy to support that financially.
Lets hope this won’t be used to make money but to help people instead.
The demo is a bit unconvincing, and the hand ‘wand’ is a poor replacement for just using your hand without an attachment.
It has potential, but it needs some work it seems.
Mind you it would require the person to get used to it too, so the demonstration is only half done as it were until they fund a blind person and had him/her use it a while. But from the video it does seem the range is too limited or too narrow or wide or something though.
But I’m sure this has been tried many times before, and seeing it isn’t standard for the blind I have a suspicion there are as of yet unsurmounted issues.
This is better than a white stick how?
I think its a great innovative project and congratulations to the team and I am thinking to do this as my project kindly give me some guide lines , or if u can sell fully made project I can buy it,
For anyone interested, here are a couple of other examples of this kind of project, with how to sections:
The Tacit (CC licensed)
http://grathio.com/2011/08/meet-the-tacit-project-its-sonar-for-the-blind/
Tacit Theremin. I, along with some guys at Omaha Maker Group modded the Tacit to be a wrist mounted, speaker output device. There’s a video in the first link.
http://omahamakergroup.org/2011/10/22/tacittheremin-a-spatial-awareness-tool-for-the-blind/
http://projects.omahamakergroup.org/index.php?title=Tacit_Glove