After the first flight of your newly built multi-copter, you will immediately want to add a camera. This sequence of events follows the laws of physics and is as predictable as gravity. Just strapping a camera on by way of a fixed bracket may technically solve that problem, but it creates another. A multi-copter tilts and rolls as a result of changing flight direction. If the multi-copter tilts and rolls, so does your camera. This is where a gimbal comes in handy, it adjusts the camera in an equal and opposite direction than that of the aircraft. If the aircraft tilts forward, the gimbal tilts the camera backward the same amount. The result is a steady camera for capturing some sweet videography.
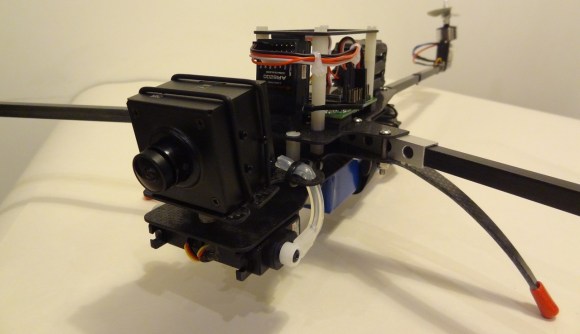
 Team SSG over at rcgroups.com has come up with what they are calling the Super Simple Gimbal. Their vision was a gimbal that would be inexpensive, easy to build and add minimal weight to the aircraft. On a normal gimbal, there are two motors or servos, each one specifically controls a single axis of movement. On the SSG, there are 2 servos but they do not move independently from one another. The camera is mounted to a plate that is supported on one end by a piece of silicone tube which becomes a fulcrum for the system. The other side of this plate is supported by 2 linkages (also made of silicone tube) that are themselves connected to the servos. If both servos move up, the camera is tilted down. If the right servo moves up and the left down, the camera is tilted to the left.
Team SSG over at rcgroups.com has come up with what they are calling the Super Simple Gimbal. Their vision was a gimbal that would be inexpensive, easy to build and add minimal weight to the aircraft. On a normal gimbal, there are two motors or servos, each one specifically controls a single axis of movement. On the SSG, there are 2 servos but they do not move independently from one another. The camera is mounted to a plate that is supported on one end by a piece of silicone tube which becomes a fulcrum for the system. The other side of this plate is supported by 2 linkages (also made of silicone tube) that are themselves connected to the servos. If both servos move up, the camera is tilted down. If the right servo moves up and the left down, the camera is tilted to the left.
 So how do the servos know what to do and when to do it? Some multi-rotor flight control boards have outputs for connecting the servos directly. The control board uses the on-board gyroscopes and accelerometers to sense the movement of the aircraft and determine how much to move the camera.
So how do the servos know what to do and when to do it? Some multi-rotor flight control boards have outputs for connecting the servos directly. The control board uses the on-board gyroscopes and accelerometers to sense the movement of the aircraft and determine how much to move the camera.
If you are interested in making one of these for yourself head over to the above link to find everything you need. Thanks goes out to Team SSG for documenting this project so well. If a fancy brushless motor gimbal is more your style, check out this one you can print with your 3D Printer.















Why do you need a motorized gimbal at all? Couldn’t you just hang the camera off the quadcopter with string? You couldn’t fly it upside down, but…
The camera will Swing back and forth.
Quads move ever so slightly, cross winds, wind from the propeller…
This actually is pretty cool.
Going back and forth will make the camera have a balancing effect. It would swing out of control quickly.
Would need a really heavy camera to make it “stable” which is not an option
This is really great. I considered buying a cheap Chinese brushless gimbal but I prefer this even cheaper and simpler solution. Guess what I will be doing this weekend! :)
That’s a very nice design, I’ve never liked servo gimbals much because of their large size and poor quality compared to a brushless gimbal,but this design could work for me, it’s so lovely and tiny. To top it off, it’s symmetrical, and wouldn’t have to have counterweights!
I’m concerned about the tilt distance though. I can’t get at youtube at the moment, but it doesn’t look like it could angle very much.
Even if the tilt distance is poor, it looks like it should have enough to stabalise most but the fiercest flying, and given you could knock one up for $10-15 it’s a great entry level option before upgrading to a fully featured gimbal.
what about the picavet system? like for kites? http://kap-man.de/pvet01.gif
http://1.bp.blogspot.com/-UhfwwzZwSYQ/UMq0o_UFntI/AAAAAAAABy4/PEUD5giXCF0/s1600/picavet3.jpg
http://www.instructables.com/id/Kite-Aerial-Photography-Picavet-System-Fun-Simple-/?ALLSTEPS i’ve never tried it because copters aren’t my thing, but… you could probably make a system like that, or at lest similar that distributes the weight evenly beneath the copter and acts as a steady cam for minimal weight. only problem i see is landing and taking off. and maybe turning. but even so, semirigid linkages might still be lighter weight than servos.
Funny you should post this. I just built one this week. I’m using it with MultiWii and it works well, but I need to order some nicer digital servos. The resolution of analog servos just isn’t good enough, and you can see the stepping in the video.
I have a bunch of parts for a quad, a cnc machine, and a gallon of urethane resin along with all sorts of other things… I need to build it sometimes :(
If the only purpose is to stabilize the camera, what are the servos needed for anyway? Wouldn’t a simple weight on a gimbal keep the camera position steady – and with no lag?
You would want to reduce weight in flying machine. Adding weight is not a solution.
Yet, you add two servos, tubing, a piece of wood, plastic, a mixer, possibly even additional batteries (because this is going to chew them up.)
Honestly… you don’t need much weight. Just make some distance between the pendulum and the fulcrum. Hell, use the servos as the weight.
In fact, there is no reason that you couldn’t just use the weight of the camera hanging with a proper mechanism and some dampening.
No lag whatsoever in a purely mechanical system.
This does have the advantage of intentionally positioning the camera.
those are 8 GRAM servos ….
So, 16 grams for the servos… additional energy needed from the batteries, etc…
We are not talking about hanging 5lb weights here.
Seriously? Sigh…
Basic physics. If the copter changes direction, a weight will swing to the outside of the curve. You might try a link and lever to make the camera tilt opposite to the swing of the weight but that will fail. The weight does not know the difference between gravity and centripital force. A proper coordinated turn will produce a force vector that is vertical in the copter’s frame of reference, not the Earth’s and a pendulum will not be able to tell anything has changed. The inertial nav system supplies tilt information – at least that is what I get from the video. If you fly long enough I suspect it will drift and leave a permanent tilt until reset.
I designed a printable version of the Super Simple Gimbal some time ago: http://www.thingiverse.com/thing:278966
Looks like a nice/clever solution. How about putting the accels and micro onto a PCB shaped like the plate the camera fits too, that way you can have a self compensating ‘camera on a stick’ without the need for an external control board.
Would be awesome for self filmed skiing trips.
I can’t see this lasting very long under repetitive movement without proper joints. It will suffer fatigue and break or at very least give an inconsistent amount of tilt.