Micro servomotors are a hacker staple. You’ll find maybe four or five in an RC plane, while a hexbot build could soak up a dozen or more of the cheap and readily available devices. Unfortunately, long-throw linear actuators are a little harder to come by, so it’s nice to know you can 3D-print linear gearing for standard micro RC servos and roll your own.
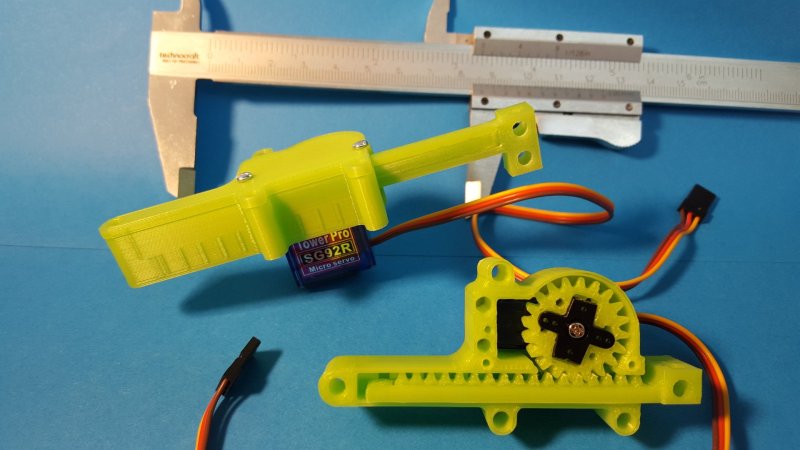
Currently on revision 2, [Roger Rabbit]’s design is not just a quick and dirty solution. He’s really thought through the problems he observed with his first revision, and the result is a robust, powerful linear actuator. The pinion fits a trimmed servo crank arm, the mating rack is stout and stiff, and early backlash problems have been solved. The whole case is easy to assemble, and as the video below shows, the completed actuator can lift 300 grams.
We like [Roger]’s build process, especially the iterative approach to improving the design. We’ll stay tuned to see where it goes next – a continuous rotation servo for extra-long throws? While we wait, you might want to check out [Richard Baguley]’s recent primer on servos if you want a little background on the underlying mechanism.














This is great!
I have been trying to figure out how to do this to get much larger (4-6 inch) throws. It’s not easy work. Great job!
If you can use larger servos look at winch servos which provide multiple turns. A typical use is to control the positioning of the sail on model sail boats where you might need a 720 degree or more rotation to control the lines.
Gearing. Of course it will be at the expense of torque, and therefore strength.
Combining this with a worm gear would get very interesting.
A scotch yoke mechanism would be simpler to construct than rack and pinion.
https://d2t1xqejof9utc.cloudfront.net/screenshots/pics/76f0f37a19b4f328ff9f81d6d40bb6b1/medium.gif
This is a linear servo. A scotch yoke in nonlinear (sinusoidal). A simple servo arm commonly used on R/C model aircraft already does a sinusoidal stroke with sufficient range to operate rudder and ailerons. Whereas a linear actuator is linear, not requiring and trigonometric computations to travel a given distance.
s/yoke in/yoke is/ s/requiring and/requiring any/ Where is the EDIT button?
Neither is a simple microservo.
Point being that an analog servo has less and less holding torque as it approaches the ends of its travel because the PWM pulses used to drive the motor are generated in comparison by stretching the incoming control pulse.
That means the maximum pulse width that actually drives the motor gets shorter and shorter the further away you deviate from center position and any sort of load on the servo causes more slack the further in or out you try to hold or move it. There’s no way to get reliable and accurate repeatable linear motion over the entire range of motion unless you gut the servo and build your own feedback system.
A scotch yoke mechanism – while being sinusoidal – actually compensates for the loss of torque at the far ends of the travel by increasing the amount of leverage the motor has on the shaft, so that helps for better repeatability of position under load. It also has one less joint compared to a common crank and slider mechanism.
Suggestion for rev 3. eliminate cogging by printing helical teeth on the gears and angled teeth on the rack. Each tooth should engage it’s mate on one side of the gear before the previous tooth disengages on the other.
why not herringbone gears?
Cool, but why not use a herringbone pattern and keep the rack aligned with the gear?
That is a bit of a trade off. It makes assembly slightly harder, and with the top cover has very little benefit. On the other hand you could make it without the top cover. That would be weaker though if the cover provides any stability to the side walls.
You could retain the usefulness of the positioning info by modding the servo for continuous rotation and putting the pot on a second gear. Use a multi turn pot for longer throws. You could also change gearing on both the pot and servo to achieve different speeds and torque, and different lengths per degree of rotation.
I want to know what printer equipment he has thats producing parts that small with that accuracy….
My Makerbot Replicator can easily print parts that small and smaller with accuracy.
Quality … :)
The second leg, in addition to hardening the structure, also make it look like a tortoise. ????
This is a great build and most of all it highlights that there is a need for mid-hobby-size linear servos, particularly with extended throw.
There are the tiny Spektrum and larger Firgelli type models that are commercially available (and of course the larger industrial stuff) but I’m surprised that that the mid-range doesn’t seem to have (m)any offerings. This may be because people have been adapting the cheap rotary models with various other methods (cables, simple mechanisms etc) for so long.
Hmmm.. this may be just what I need for a few projects that I have been dreaming about.
This could be useful with a longer throw (modded servo for continous rotation and loger piston) for a tracking device for my solarcells.
Also as up/down axis for a sattelite tracking antenna rotator.