[Greg Zumwalt], master of 3D-printed mechanisms, has published his Saber 2 project as well as an assembly Instructable telling you how to put it together.
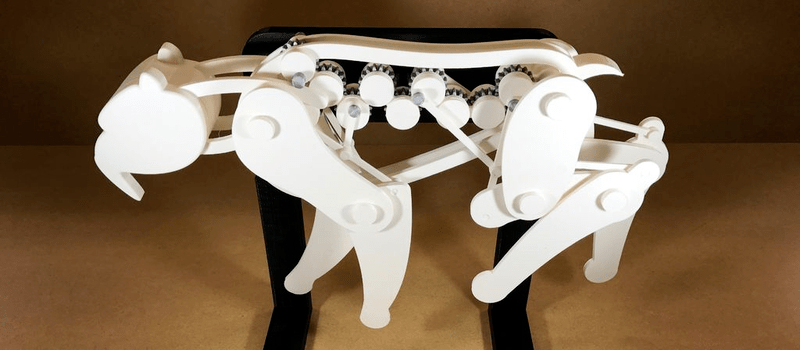
Saber 2 is a 3D-printed gear-and-cam saber-toothed tiger that can be motorized to show an excellent loping movement. It’s 14” long and 10” tall and consists of 108 components of which 34 are unique parts, and it all moves with the help of a 6 VDC 60 RPM gearmotor. With threaded PLA rods to keep it all together, and tapped holes to secure the rods, one imagines the printer would have to be pretty finely tuned and leveled for the parts to move as elegantly as you see in the video.
Hackaday readers might recall [Greg]’s 3D-printed projects such as his balloon-powered engine as well as his toy car also powered by balloons.















If this was made into a “dinosaur” it would be very nice.
I’m glad it isn’t a dinosaur, this is very nice. I like the slower moving smaller one with the red parts. The slower movement makes it looks even better. Perhaps a switch with 3 speeds?
Cool project.
This makes me wonder if [Greg] has somehow got his hands on Disney’s ‘Computational Design of Mechanical Characters” software. If so, I am very envious as I spent a long time trying to find it but concluded that it is not available.
https://www.disneyresearch.com/project/mechanical-characters/
There’s a 12 page PDF linked on that page with all the math. The math is mostly Pythagoras to, instead of trig which is even better.
I doubt you will find the software but you can grab the PDF and your favorite programing language (that optionally renders as well) and your on your way.
I use JavaScript/HTML in a browser because JavaScript can do reasonable math and a browser can render. For more oddball stuff I use a rendering engine called Love2D that is based on LUA, It’s a very nuts and bolts language so it’s good for very complex stuff. Simple stuff is better off in a browser window.
That Love2D thing looks pretty nifty, thanks. I did a 4-bar linkage simulator in C# and that was a bit of a PITA with rendering in GDI or WPF. Javascript is a pretty good call.
Because of this?
[youtube https://www.youtube.com/watch?v=DfznnKUwywQ&w=500&h=281%5D
simulate it in linkage(windoze) http://blog.rectorsquid.com/linkage-mechanism-designer-and-simulator/
It’s a lovely creation and I like that it’s in time with itself, but it would annoy me that the back legs seem to be carrying the animal forward faster than the front legs.
Ha! I was about to say that. It’s pretty cool, but it could be way better. Take video of an actual animal running… trace the shapes various joints make on a 2D plane, and work backwards from the motion of those paths to figure out how to design the cams.