If you were a child of the 1980s whose fascination extended to the contents of your local Radio Shack store, you may remember the Armatron robot arm as a particular object of desire. It was a table top robot arm operated not by motors or a microcontroller, but by a clever set of gears directed manually from a pair of joysticks. If you took a look at it with an eye to control from your 8-bit home computer you were likely to be disappointed, but nevertheless it was an excellent toy.
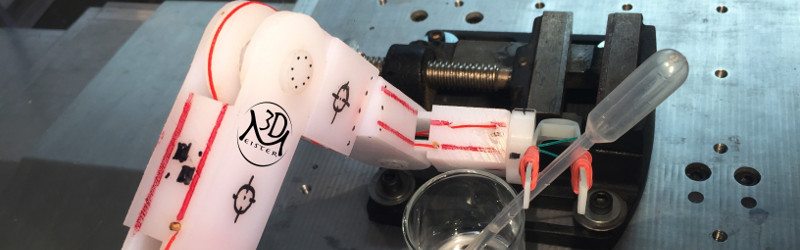
The Armatron may be long gone, but if you hanker for a similar device you should take a look at [3D Meister]’s finger controlled six axis arm. This is an arm similar to the Armatron in size, but with far more capabilities. Control is via cable loops to sliders at the arm’s base, and in addition to the usual arm movements there is an extra loop which can be used to operate any of a selection of tools including a gripper, a magnet, and a clipper. The video below the break shows the arm in action, and for the faint-hearted it should be noted that it contains the gratuitous death of some innocent plants.
Miss the Armatron? Take a look at this steam-powered example. And for a simpler arm, reach for the paperclips.

















Very cool! Cable-drive robotics is interesting. :)
Here’s some stuff I’ve found about the topic…
According this chart, choosing aluminum for its stiffness/density is a solid idea:
http://www.lehigh.edu/%7Eintribos/Resources/chart1.jpg
Here the patent drawing of the WAM robot arm from Barrett Technology:
http://patentimages.storage.googleapis.com/pages/US5207114-6.png
It uses a differential windlass to develop great force and speed.
And here is a Jarvis brace winch, used for steering the yard of a ship:
https://modelshipworld.com/uploads/monthly_11_2016/post-8878-0-98567700-1479247976.jpg
As you can tell from the diameter of the wire rope, it handles quite a bit of force. Yet, it is operated by hand by only two or four crew
Good contributions. The chart is a bit misleading as it’s log-log and concentrates on tensile properties. For example, most steels are 3X the density of aluminum and 3X the modulus. So, for a tensile item, steel is the more compact, but weighs the same for the same deflection.
In bending, the stiffness of simple items is proportional to the cube of the thickness, so for a flat plate of the same weight an aluminum plate is 3X the weight, but 27X the stiffness; an advantage of 9:1 over steel.
I do like the winches so I looked them up. Capt. Jarvis was quite the guy: http://www.bruzelius.info/Nautica/Biography/GB/Jarvis,_JCB.html
really like this. Looking at it, I’m wondering if it would be possible to make something similar with a saw and drill, but if not it might actually be something that convinces me to get hold of a 3d printer.