Most CNC robots people see involve belts and rails, gantries, lead screws, linear bearings, and so forth. Those components need a rigid chassis to support them and to keep them from wobbling during fabrication and adding imperfections to the design. As a result, the scale is necessarily small — hobbyist bots max out at cabinet-sized, for the most part. Their rigid axes are often laid out at Cartesian right angles.
One of the exceptions to this common configuration is the delta robot. Deltas might be the flashiest of CNC robots, moving the end effector on three arms that move to position it anywhere in the build envelope. A lot of these robots are super fast and precise when charged with carrying a light load, and they get put to work as pick-and-place machines and that sort of thing. It doesn’t hurt that delta bots are also parallel manipulators, which means that the motors work together to move the end effector, with one motor pulling while the matching motor pulls.
But while Cartesian CNC bots are sturdy workhorses, and deltas are fly-weight racehorces, neither can really cut it when you want to go gigantic. In terms of simplicity and scale, nothing beats cable bots.
Cable Bots
Cable bots use wires or strings pulled by reel-mounted motors, with dimensions limited only by the room to mount the motors and the tensile strength of the cables used. When the strings are tensioned you can get a surprising degree of accuracy. Why not? Are they not computer-controlled motors? As long as your kinematic chain accounts for the end effector’s movement in one direction by unwinding another cable (for instance) you can very accurately control the end effector over a very wide scale.
The following are some fun cable bots that have caught my eye.
Skycam
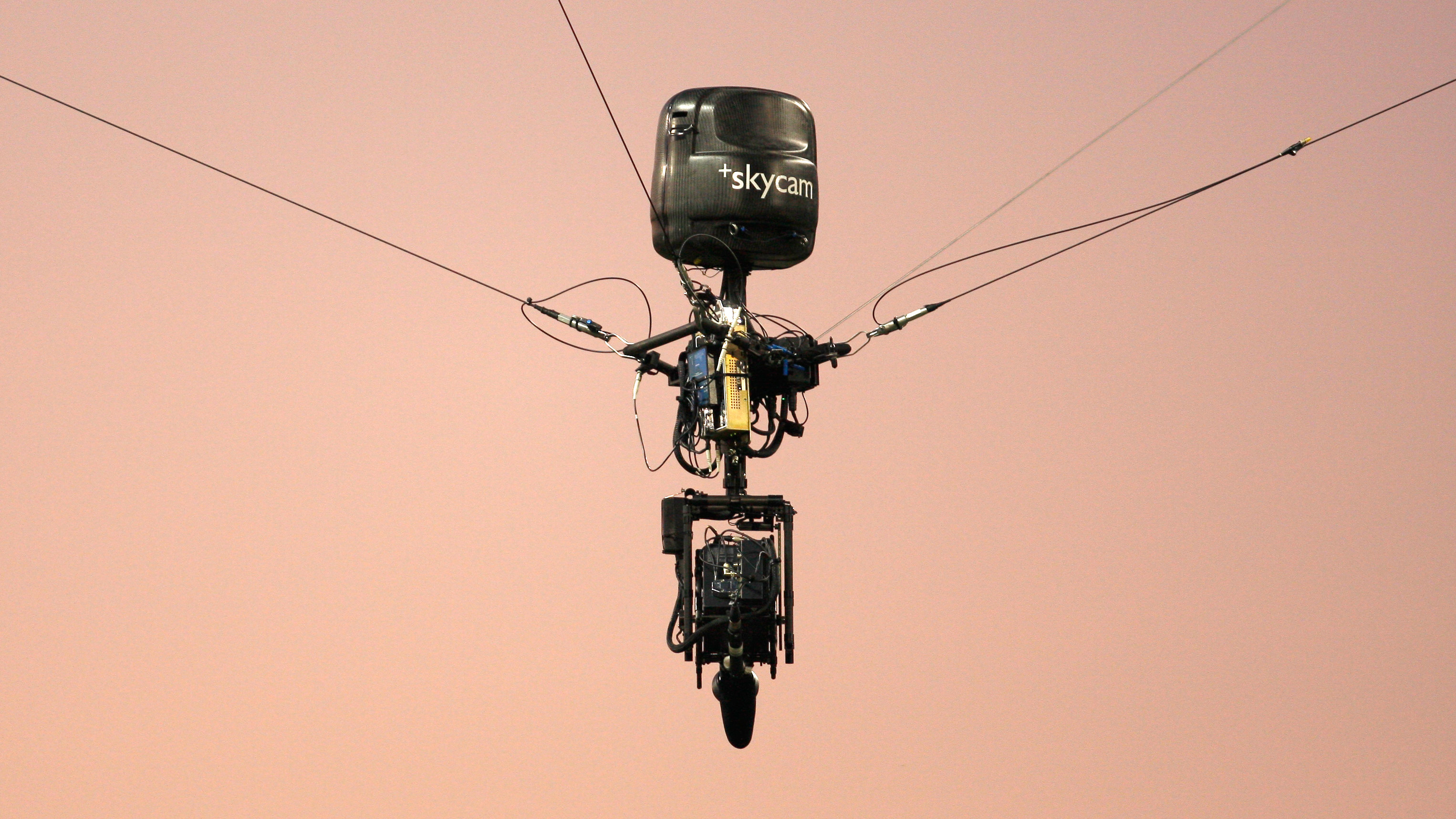 Forget merely room sized — Skycam is the brand-leader of stadium sized cable bots. If you’ve watched any NFL you’ve seen the camera robots that zip overhead, following the action from close up thanks to a gimbal-mounted camera.
Forget merely room sized — Skycam is the brand-leader of stadium sized cable bots. If you’ve watched any NFL you’ve seen the camera robots that zip overhead, following the action from close up thanks to a gimbal-mounted camera.
Each reel is controlled by its own computer, with a two-operator control rig centering around a Linux box. The 600-lb cables are kevlar-jacketed optical fiber and copper, and addition to moving the camera module (the “spar”) the wires transmit power and data. The 3.4 kW motors are equipped with encoders that ensure 1/100th of an inch in resolution.
If anything would tell you that cable bots scale up insanely it should be Skycam. What’s next? City-sized cable bots? World-sized CNC?
Trammel Hudson’s Polargraph
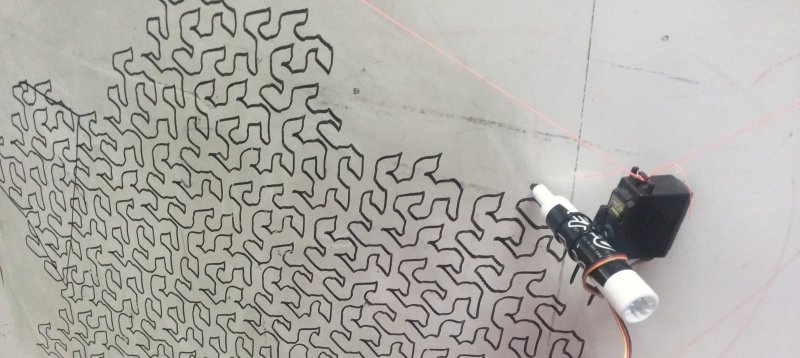
 Way at the other end of the spectrum are two-stepper drawbots sometimes known as polargraphs or hanging v-plotters. They consist of a pair of stepper motors with reels controlling strings hanging down, with a module at the bottom equipped with a pen. Gravity provides tension, allowing the polargraph to make surprisingly precise lines.
Way at the other end of the spectrum are two-stepper drawbots sometimes known as polargraphs or hanging v-plotters. They consist of a pair of stepper motors with reels controlling strings hanging down, with a module at the bottom equipped with a pen. Gravity provides tension, allowing the polargraph to make surprisingly precise lines.
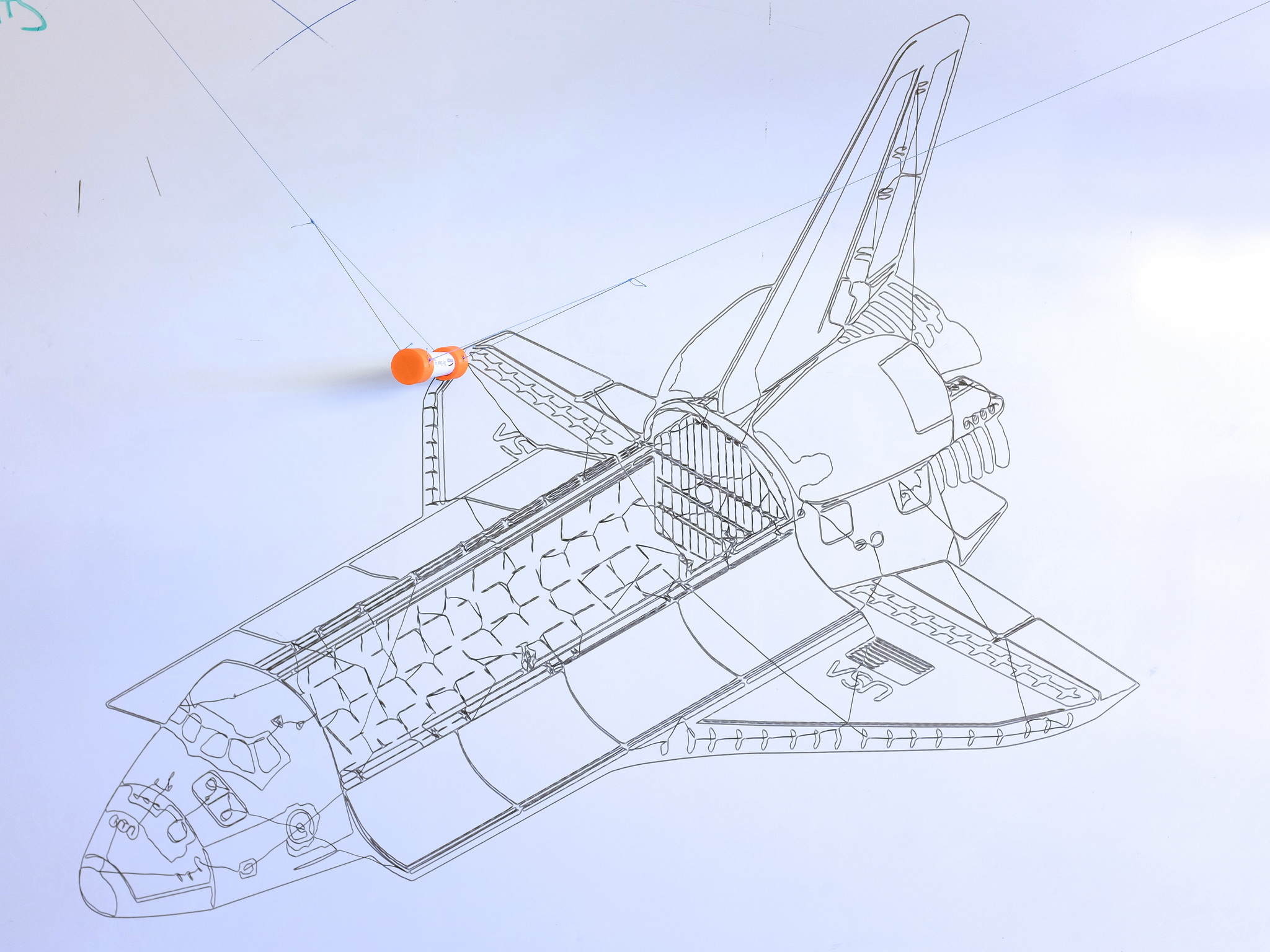
Despite Trammel’s great results, it’s actually quite a simple rig; the project uses a TinyG CNC controller with two random steppers found at NYC Resistor. A polargraph’s toolhead can be made with nothing more complicated than a sharpie with a servo attached to it with a binder clip — the servo’s horn simply pushes back against the work surface and lifts the pen off of it. However, he went even simpler and his toolhead is simply a 3D-printed sleeve for a dry erase marker — no lift mechanism, so the drawings always include stray lines where the pen was moved. Check out Trammell’s web site to follow along with the Polargraph project, as well as assets on Flickr and GitHub.
The drawings in this post were created by Hackaday regular [Trammell Hudson]. His simplified polargraph uses a 3D-printed pen holder that has no lifting mechanism — the G-code just calls for the pen to draw from one point to the next even if that results in stray lines. [Trammell] has explored using his drawbot to make mathematically modeled patterns, like the space-filling Gosper and Hilbert curves, a visualization of a Lorenz attractor, and even mapping sine waves. My favorite is the wall-sized map of Paris.
Despite [Trammel]’s great results, it’s quite simple; the project uses a TinyG CNC controller with two random steppers found at NYC Resistor. In fact, a polargraph can be quite simple. Its toolhead can be made with nothing more complicated than a Sharpie with a servo attached to it with a binder clip — the servo’s horn simply pushes back against the work surface and lifts the pen off of it. Check out [Trammell]’s web site to follow along with the Polargraph project, as well as assets on Flickr and GitHub.
Scanlime’s Tuco Flyer
 [Micah Elizabeth Scott]’s cat, [Tuco], apparently needs his own robot to keep a camera focused on his feline glory. It’s a winch bot called the Tuco Flyer.
[Micah Elizabeth Scott]’s cat, [Tuco], apparently needs his own robot to keep a camera focused on his feline glory. It’s a winch bot called the Tuco Flyer.
[Micah]’s YouTube videos focus on her expertise in mechanical and electrical engineering, plus a lot of kitty shots, so a 3D-printed, cable-bot flying camera rig is just the ticket.
The project includes a lot of great details, like her refurbished camera gimbal and the from-scratch winches, one of which can be seen to the right. In many cases she stores the electronics inside the infrastructure, making for a very elegant build.
It doesn’t appear that the project is at the “moving stuff in the air stage” so follow the project on Hackaday.io to keep up with the latest developments.
Gravity-Defying Parallel Robots
A few days back we mentioned another work in progress, the Arcus3D, a 3D printer that uses tensioned cables to move the toolhead around, much the way the polargraph works but in three dimensions. Based off the Flying SkyDelta reprap model, [Daren]’s printer uses stepper-driven cables to move the toolhead around.
The toolhead keeps low and level thanks to a “Super Gravity Pole”, a yard-long steel pole that anchors it; otherwise it would want to fly around uselessly. This highlights the fact that gravity as a tensioning element is part of what makes cable bots as simple as they are — otherwise you’d need more cables pulling down on the end effector.
But what happens if you do just that? I haven’t seen many hobbyist-level projects involving 6-motor cable bots but there are a few commercial products they are quite simple, incredibly fast, and scarily precise. I want to close out this piece by sharing an insane cable bot project, the CableEndy. It was [Andrej Rajnoha]’s master’s thesis at Brno Institute of Technology, and it packs some pretty insane specs — just to name a couple, it accelerates the toolhead at 10 G, and with 1 mm precision.
[SkyCam photo by Despeaux, CC BY-SA 3.0. Trammel Hudson’s photos used with permission.]
Friends, share your favorite cable bot pr0n and projects in comments.














you forgot the most impressive one at the MPI in Germany: http://www.cablerobotsimulator.org
I would love to try this!
That’s truly awesome.
“It’s for research.” “And?” “Well, we now know what causes motion sickness!”
Nice, wonder what the specs need to be on the cables compared to the alternatives needs to be?
oke…oke… spelling nazi’s please notice that on 1:01 in the video above there is a “1.2ms TRASNFORMATION TIME” I expect this to be a simple spelling mistake (just swap the S and N). So not that that’s solved we can continue to the real comments.
That “CableEndy” is incredible fun to watch. But an accuracy of 1mm to 5mm I did not expect, I also wonder what it could be used or is intended for. The video where it plays with the ball is incredible (although I doubt is is really playing, but you get my drift, MEGACOOL to watch).
TRIGGRED!!!
So NOW that that’s solved, we can continue to the real comments.
You missed the most impressive demonstration of CableEndy: https://gfycat.com/EnragedFickleCommongonolek
And Tuco Flyer is absolutely moving stuff in the air, although only in a one-winch test fixture right now.
thats damn cool.
If you were to make a six cable bot I expect that running the lower cables as series elastic actuators with the control loop maintaining a set level of tension and paying out or reeling in cable to maintain it’s set tension. It might even be possible to have the top and bottom halves of the tool carrier joined by a ball joint do you could tilt the tool by balancing the tension on the bottom lines…
Hmm… and balance the tensions with a counter-weight, like an elevator.
Hmmm balanced and counterweighted it would use little power to move, solar powered weeding bots come to mind.
I think I’m in love with the robot in that last video. Holy shit.
https://twitter.com/twitter/statuses/920362896952930305
Holy CSS break batman!
Also, that is one agile robot.
Video here instead of an animated gif: https://twitter.com/Vlastimil_Hovan/status/919971533451382786?s=15
and maslow cnc of course which uses polargraph with chain and a router to mill large ply sheets.
– http://www.maslowcnc.com/
– https://www.youtube.com/channel/UCItcVCx_yzg59jxuRzcyImg/videos?sort=dd&view=0&shelf_id=0
I thought the whole article was going to be about Maslow and it didn’t even get a mention :(
+1 for Maslow cnc. It seems to be a good application for accessible sheet wood machining.
Why does Skycam need “1/100th of an inch in resolution”? That seems like overkill for something that covers an area, well, the size of a football field…and doesn’t need to be specifically positioned with anywhere near that resolution. Hmm…maybe necessary for keeping the camera level? Or assuring smooth movement for broadcast TV?
They probably just pulled the specs for the encoders, did the math for the cable playout, and claimed that as the resolution. This is technically correct assuming you have compensated for all the other variables. In the middle of the field at ground level that kind of resolution is totally possible, but the math works out to degrade the actual resolution as you move up or closer to any attachment point.
yep, and given temperature, wind, tension in the wire, etc etc it’s a silly number to quote..
I tend to think a stiff breeze would have it off by 6″ just from wind load on cables.
Football stadiums are small potatoes for Skycam. They set those up at NASCAR tracks. Probably costs less than hiring a helicopter, and it can get better shots. Skycam is also responsible for the only camera caused caution and race stoppage in NASCAR history. A cable broke at the 2013 Coca-Cola 600, dropping the camera to the ground and the cable injured several spectators.
Beats a tire to the face.
And you just won “Best Hackaday comment today”. Swing by the office on the way home and pick up your prize.
There’s a cable-suspended crane/robot (in turn suspended by a gantry) helping with dismantling the Chernobyl power plant. The whole the whole hour-long NOVA program is worth watching, but the robot stuff starts around 28:15. The used 6 cables from above and added more gravity to stiffen it up.
https://youtu.be/Hx1TrJ1710c?t=1709
I may I’ll catch some heat for this, and it’s flattering that Polargraph has entered the tinkerer’s lexicon… But it is a brand name used to differentiate a particular product from other machines – not a generic name for these kinds of hanging-V drawbots. Trammel Hudson’s is an unusually elegant version.
Check out my 4 stepper cable bot, zarplotter.com
You guys forgot to include Hangprinter (I think it was featured on HaD a while ago): https://vitana.se/opr3d/tbear/
There is a new video of CableEndy wire robot with ball juggling. Check it out :D
https://www.youtube.com/watch?v=7HNAL8ZKdyM