As auto manufacturers have brought self-driving features to their products, we’re told about how impressive their technologies are and just how much computing power is on board to make it happen. Thus it surprised us (and it might also surprise you too) that some level of self-driving can be performed by an Android phone. [Mankaran Singh] has the full details.
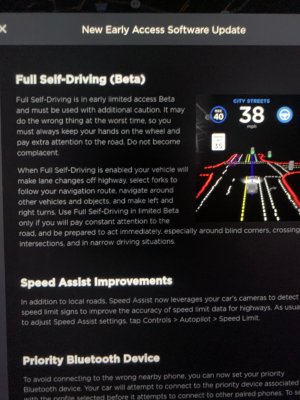
It starts with the realization that a modern smartphone contains the necessary sensors to perform basic self-driving, and then moves on to making a version of openpilot that can run on more than the few supported phones. It’s not the driver-less car of science fiction but one which performs what we think is SAE level 2 self driving, which is cruise control, lane centering, and collision warning. They take it out on the road in a little Suzuki on a busy Indian dual carriageway in the rain, and while we perhaps place more trust in meat-based driving, it does seem to perform fairly well
Self driving features are codified into a set of levels for an easy reference on what each is capable of doing. We’ve taken a look at it in the past, should you be interested.