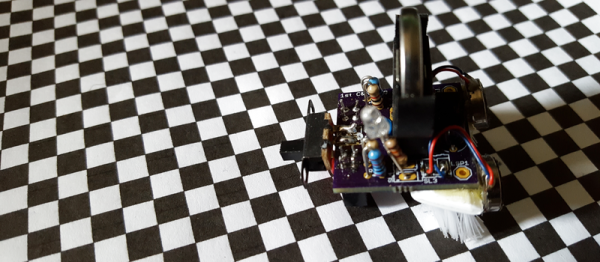
It’s been a while since we’ve seen much action on the bristlebot front, which is too bad. So we’re happy to see [Extreme Electronics]’s take on the classic introductory “robot”: the Black Line Follower. The beauty of these things is their simplicity, so we’ll just point you to his build instructions and leave the rest to you.
The original bristlebot is a fantastic introduction to electronics, because it’s simple enough that you can cobble one together in no time. A battery, a pager motor, and a toothbrush head are all you need. But it goes where it wants, rather than where you want it to go.
Adding steering is as simple as tying two bristlebots together and firing one motor at a time to execute a turn. The Black Line Follower is of this style.
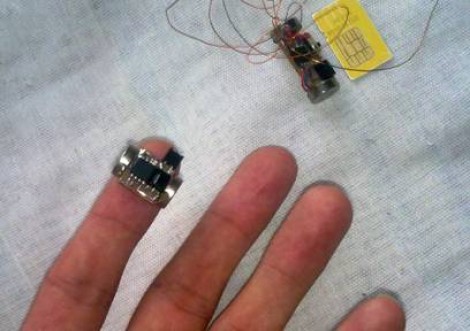
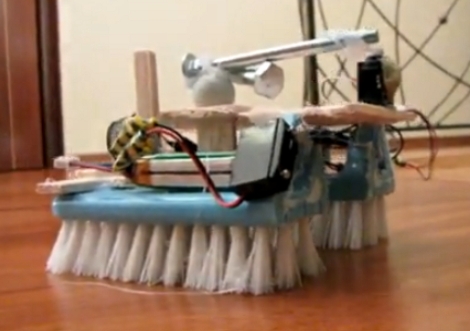
Of course, any good idea can be taken to extremes, as in this giant weight-shifting bristlebot, or this super-tiny IR-controlled bristlebot.
But that was more than five years ago now. What happened to the mighty engines of bristlebot creativity? Has the b-bot seen its finest hour? Or are we just waiting for the next generation to wiggle up to the plate?