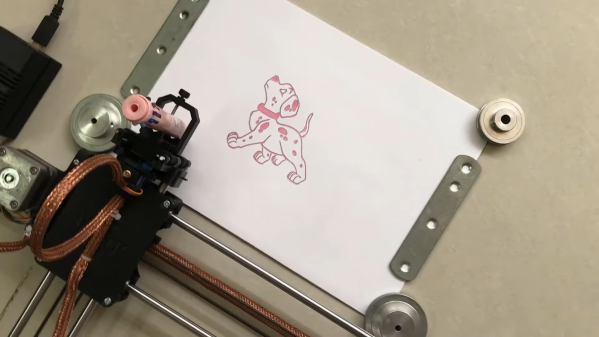
Plotters and drawing robots are fun projects that let you create art with all the precision and perfection that computer numerical control can deliver. [TUENHIDIY] demonstrates that ably with the Multicolor DrawBot.
The build relies on a simple XY Cartesian design, using a pair of NEMA 17 stepper motors. It’s built in the typical CoreXY fashion, running GRBL firmware on an Arduino Uno.
Where [TUENHIDIY] gets creative is in the pen itself. Rather than using a simple ballpoint or marker, instead, a retractable multicolor pen is used instead. With the multicolor pen on board, [TUENHIDIY] notes the importance of limit switches in the design. These allow the the ‘bot to make multiple passes, each time in a different color, to build up a multicolor image. Without the limit switches in place, it would be impossible to line up each following pass.
We’d love to see the build taken even further with a servo-based system for switching colors automatically. As it is, though, [TUENHIDIY] has a capable plotter that can deliver tidy multicolor artworks.
One of the more curious applications of plotters of late are those used to send faux handwritten letters through the postal system. Video after the break.
Continue reading “Multicolor Drawbot Highlights Importance Of Limit Switches”