Hackaday editors Elliot Williams and Mike Szczys recap a week of hacks. A telescope mirror that can change shape and a helicopter without a swashplate lead the charge for fascinating engineering. These are closely followed by a vibratory wind generator that has no blades to spin. The Open Source Hardware Association announced a new spec this week to remove “Master” and “Slave” terminology from SPI pin names. The Segway is no more. And a bit of bravery and rock solid soldering skills can resurrect that Macbook that has one dead GPU.
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!
Before it was officially unveiled in December 2001, the hype surrounding the Segway Human Transporter was incredible. But it wasn’t because people were excited to get their hands on the product, they just wanted to know what the thing was. Cryptic claims from inventor Dean Kamen that “Ginger” would revolutionize transportation and urban planning lead to wild speculation. When somebody says their new creation will make existing automobiles look like horse-drawn carriages in comparison, it’s hard not to get excited.
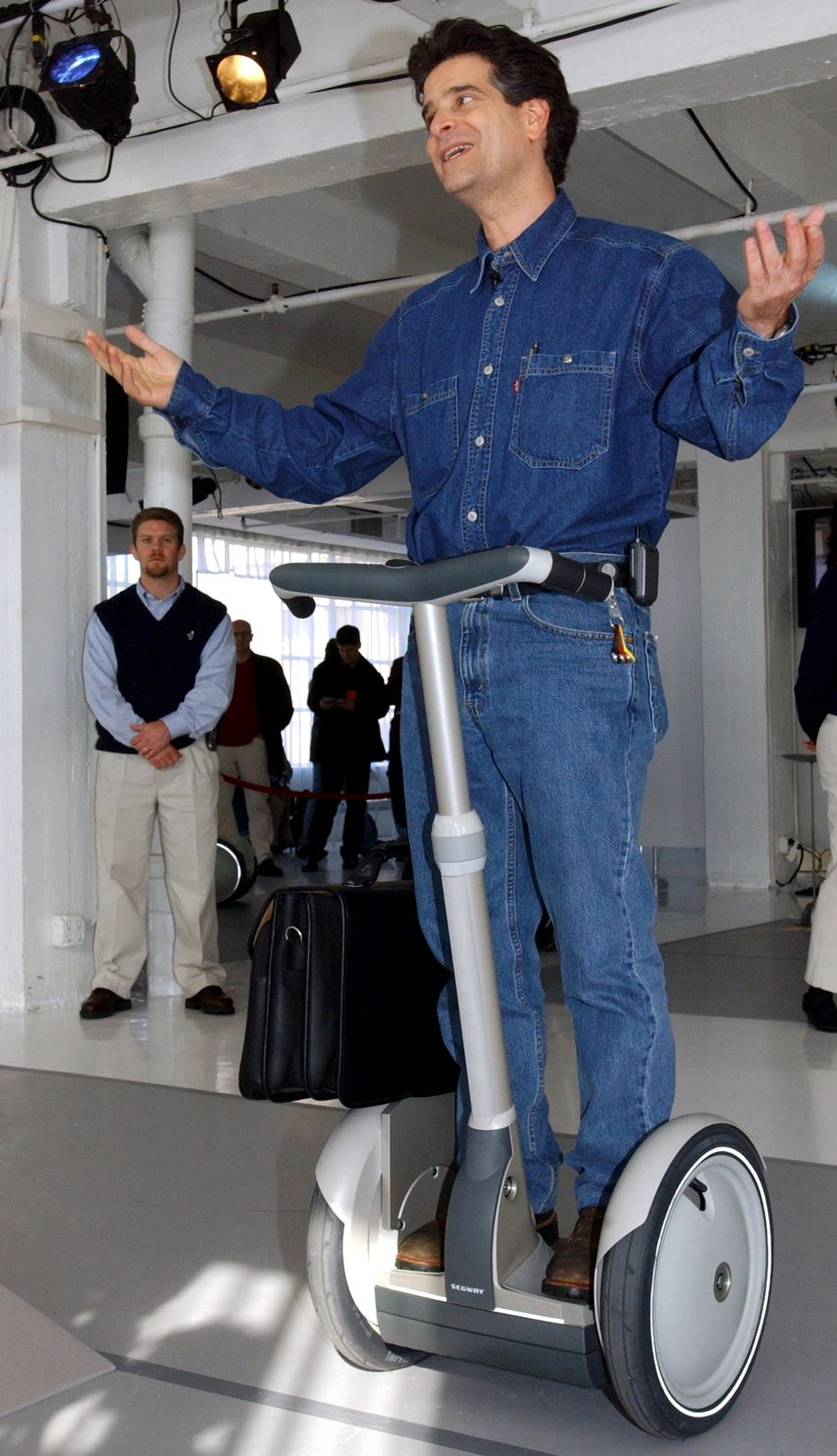
Dean Kamen unveils the Segway
There were some pretty outlandish theories. Some believed that Kamen, a brilliant engineer and inventor by all accounts, had stumbled upon some kind of anti-gravity technology. The kids thought they would be zipping around on their own Back to the Future hover boards by Christmas, while Mom and Dad were wondering what the down payment on a floating minivan might be. Others thought the big secret was the discovery of teleportation, and that we were only a few years out from being able to “beam” ourselves around like Captain Kirk.
Even in hindsight, you really can’t blame them. Kamen had the sort of swagger and media presence that we today associate with Elon Musk. There was a general feeling that this charismatic maverick was about to do what the “Big Guys” couldn’t. Or even more tantalizing, what they wouldn’t do. After all, a technology which made the automobile obsolete would change the world. The very idea threatened a number of very big players, not least of which the incredibly powerful petroleum industry.
Of course, we all know what Dean Kamen actually showed off to the world that fateful day nearly 20 years ago. The two-wheeled scooter was admittedly an impressive piece of hardware, but it was hardly a threat to Detroit automakers. Even the horses were largely unconcerned, as you could buy an actual pony for less than what the Segway cost.
Want to get somewhere safely, but all you have is a Segway? An afternoon spent tinkering can turn your Segway into a lounging cruiser with this hoverseat attachment, just like YouTuber [Inflatable Boats]’s hot new ride.
The backbone of the cart is the Segway Mini Pro. An aluminium frame attaches to the Segway via an eye-bolt and two carabiners, the larger of which has some tape wrapped around it to reduce wear. A swivel caster is attached with u-bolts to support the weight of the rider along the middle of this makeshift go-cart. Pushing on a t-handle made of pvc — connected to the Segway’s knee brace with a simple strap — engages the motor in lieu of the normal lean-to-go-forward action. Turning is simply done by swinging the handle or pressing with your feet.
We’ve seen lots of Segway variants on Hackaday, but they don’t always have detailed instructions on how they made it… Well lucky for us, [Bob] from [Making Stuff] just finished his extensive Segway project with tons of videos of the build!
Inspired by other self-balancing scooter projects he had seen online, [Bob] wanted to try his hand at building one. So he took bits and pieces from designs he liked, and came up with his own solid looking Segway clone design. Using Google Sketchup he drew up the frame, and from there it was all hands on deck. A bit of TIG welding later and it was time for the components.
Some small slight mechanical hiccups aside, the longest part of the project was the electronics and software — getting it to work like a real Segway. After writing his own code he ran into a few roadblocks, but luckily he was able to get some help from someone at his local Maker meetup which saved a lot of troubleshooting on his end.
[Jason Dorie] has been hard at work on his two-wheeled, self-balancing skateboard. He calls it the Sideway.
Similar to the Segway, it relies on the user shifting their weight to control the speed at which it will run. A Wii Nunchuk controller is used to steer, which varies each wheels output, which allows for some tight maneuvering!
Under the deck is a pair of 24V 280W (about 1/3HP each) scooter motors which are driven by two 32A Sabertooth speed controllers. They’re run off a pair of 3 cell 5Ah LiPos which get him about 40 minutes of use — not too shabby! To handle the control algorithm for the IMU, he’s using a Parallax Propeller with custom software.
To demonstrate, he takes us of a tour of one of his favorite stores — Michael’s.
[Kristian] just put the finishing touches on his full size Segway built from scratch.
Back in 2012, he made a small balancing robot using a gyroscopic sensor and a PID controller — you can see the original post here. The cool thing is, he’s basically just scaled up his original project to create this full-size Segway!
It uses two 500W 24V DC motors (MY1929Z2) on an aluminum check plate frame, with the rest of the structure made from steel plumbing and fittings. What we really like is the steering linkage; similar to a real Segway, you pull the handle in the direction you want to turn. He’s accomplished this by putting another length of pipe parallel to the wheels which is connected by an elbow fitting to the handle bar. It’s supported by two pillow block bearings, and in the back is a fixed potentiometer — when you lean the handle bars one way, the pipe rotates, spinning the potentiometer. To make it return to neutral, he’s added springs on either side.
There’s an impressive build log to go along with it, and a great demonstration video after the break.
[Matt Turner] tipped us off back in January about his homemade Segway project. Unfortunately that message slipped through the cracks but we’re glad he sent in a reminder after reading Friday’s feature an a different 2-wheeled balancer.
We like it that he refers to this project as being on the budget of a graduate student with a young family. We certainly understand where he’s coming from, and we hope he can ride this to job interviews to show them he truly lives engineering. The control circuitry is a bit higher-end than we’re used to seeing. He chose a Cypress CY8C29466 SoC to control the device. But the sensors are a common choice, using the Wii Motion Plus and Wii Nunchuk for the gyroscope and accelerometer they contain. This is a no-brainer since the sensors are high-quality, cheap and available locally, and communicate of the standard I2C protocol.
When looking for motors [Matt] was happy to find an old electric wheelchair on Craig’s List. This also gave him a gear box, wheels, and tires. He added a pair of motor drivers, with his own alterations to suppress feedback. Sounds like they run a little hot because he plans to add cooling fans to them in the future. But this first iteration is up and running quite well as you can see in the clip after the break.