From the looks of it this clock is a couple of months ahead of its time. [Oscar] built the clock (translated) taking time to add a lot of goodies into the mix. First up, the parts you see include six large 7-segment displays for hours, minutes, and seconds as well as an LED marquee which can scroll messages. Inside there’s a temperature and humidity sensor for environmental feedback, and an Xbee module which allows for wireless computer control. Time is kept by a DS1307 real-time clock, which is read by an Arduino Uno, then pushed to the display by the pair of I2C addressable SAA1064 drivers. The whole thing was enclosed in four sheets of granite for the box, and a pane of glass for the front. We sure hope it’s well anchored to that wall. You can see it ticking away after the break.
[JP Carrascal] hacked his guitar by adding motion control while removing the need for wires. He’s using a dual-Arduino system with an Mini Pro inside the guitar and a Duemilanova for the receiver connected to a computer. Wireless is provided by the XBee module seen above and a gutted Wii remote accelerometer is in there for motion sensing. Check out the artfully blurry demonstration of the motion effects after the break.
While he added some potentiometer-based controls there is also an automatic power-down feature. [JP] replaced the mono pickup with a stereo one and used the extra conductor as a switch to activate the additional electronics. We wonder if he also winds his own pickups or builds his own effects pedals.
NYC Resistor hosted a wearable wireless workshop today. It was taught by [Rob Faludi] and [Kate Hartman]. They brought along their recently released LilyPad XBee breakout boards. The goal of the class was to use the digital radios to build wireless communication gloves. Above, you can see the conductive thread sewn into the fingertips to key the device. The signal is transmitted to the other glove, which flashes an indicator LED so you can communicate using Morse code.
How do you figure out what is in a moving body of water over a mile wide? For those in charge of assessing the water quality of the Delaware river, this is a real problem. Collecting the data required to evaluate the water quality was expensive and time-consuming, taking over six years. Even then, the data was relatively sparse, with just a few water quality stations and only one surface sample for every six miles of river.
Sherry Chen, Quinn Wu, Vanessa Howell, Eunice Lee, Mia Mansour, and Frank Fan teamed up to create a solution, and the SS MAPR was the result. At Hackaday Supercon 2022, Sherry outlined the mission, why it was necessary, and their journey toward an autonomous robot boat. What follows is a fantastic guide and story of a massive project coming together. There are plans, evaluations, and tests for each component.
Sherry and the team first started by defining what was needed. It needed to be cheap, easy to use, and able to sample from various depths in a well-confined bounding box. It needed to run for four hours, be operated by a single person, and take ten samples across a 1-mile (2 km) section of the river. Some of the commercial solutions were evaluated, but they found none of them met the requirements, even ignoring their high costs. They selected a multi-hull style boat with off-the-shelf pontoons for stability and cost reasons. Continue reading “Supercon 2022: All Aboard The SS MAPR With Sherry Chen”→
Homebrew HVAC systems are one of those projects that take such a big investment of time, effort and money that you’ve got to be a really dedicated (ideally home-owning) hacker with a wide variety of multidisciplinary skills to pull off an implementation that can work in reality. One such HVAC hacker is [Vadim Tkachenko] with his multi-zone Home Climate Control (HCC) project that we covered first back in 2007. We now have rare opportunity to look at the improvements fifteen years of part-time development can produce, when a project is used all day, all year round in their own home. At the start, things were simple, just opening and closing ventilators with none of those modern MQTT-driven cloud computing stuff. Continue reading “Is This The Oldest Open Source HVAC Project In Existence?”→
It’s now about six years since Star Wars: The Force Awakens first showed us the little spherical robot BB-8, but it’s fair to say that along the way we’ve not lost our collective fascination for rolling-ball robots. There have been plenty of attempts to make a fully-rolling device, but perhaps [Derek Lieber] has a better take on it by turning a spherical robot into a two-wheeled roller by the addition of a pair of tyres. Inspired by a Samsung prototype that never made it to market, it works by the wheels working against the machine’s low centre of gravity, and using a tilt sensor to control speed.
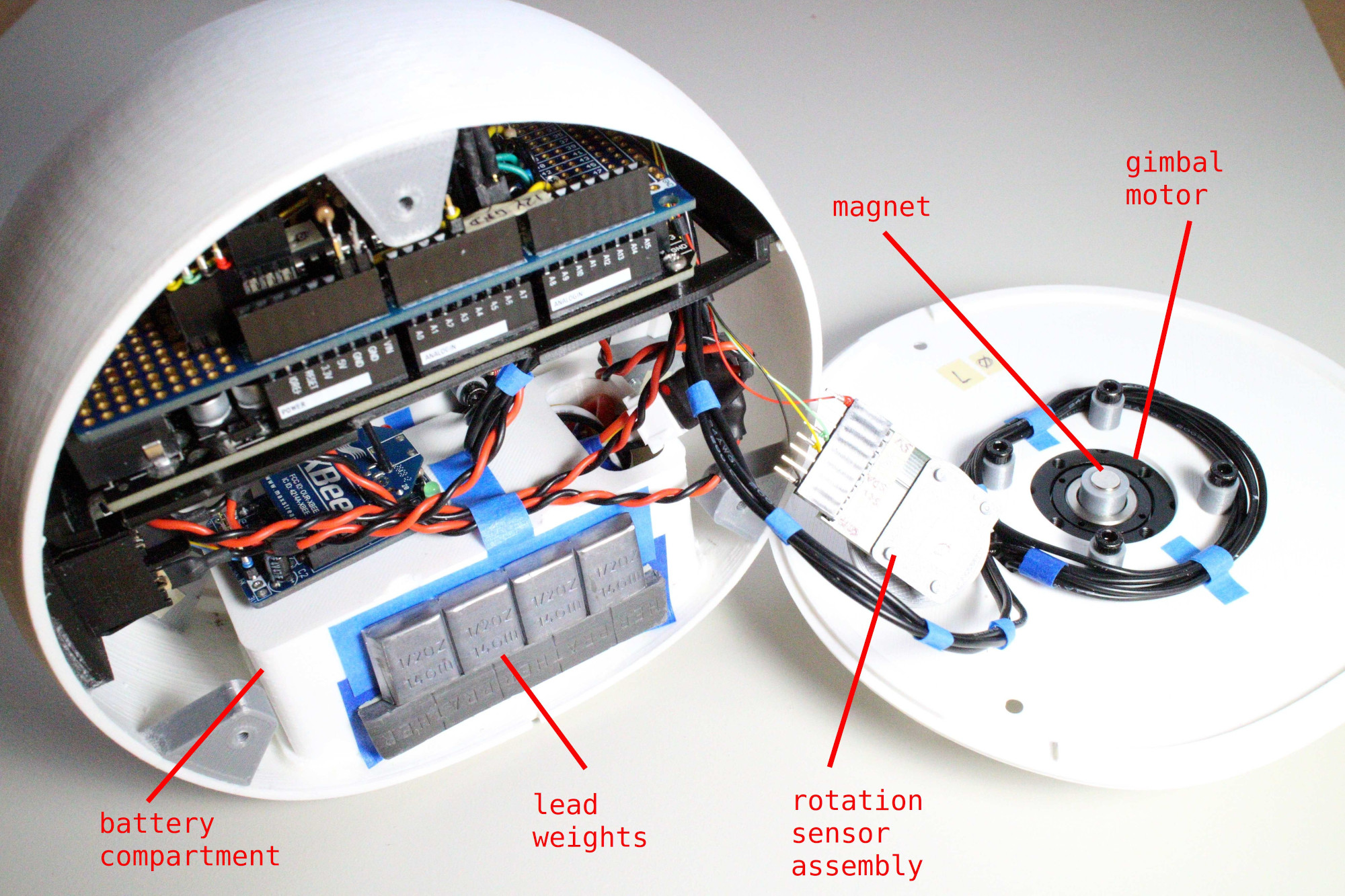
The ball chassis is a 3D printed shell, into which after much experimentation with motors, the final version put a pair of gimbal motors with a set of magnetic position sensors. Inside is an Arduino Mega and a custom motor driver board sporting an LM6234, with an XBee radio for remote control. Meanwhile the power comes from a set of three LiPo cells, and there is some extra lead ballast in the bottom to keep the whole thing balanced.
Here at Hackaday we’re always exited to see hacks that recycle our favorite childhood consoles into something new and interesting. In that context, it’s not so uncommon to see mods which combine new and unusual control methods with old devices in ways that their manufacturers never intended. What [Mike Choi] has built with the Labo Fit Adventure Kit is the rare hack that combines radically new control schemes with a modern console: without actually modifying any hardware.
Face button pusher in blue
In short, the Labo Fit Adventure Kit lets the player play Mario Kart on the Nintendo Switch by riding a stationary exercise bike, steering with a wheel, and squeezing that wheel to use items. The Fit Kit combines the theme of Labo, Nintendo’s excellent cardboard building kit for the Nintendo Switch with the existing Ring-Con accessory for the unrelated Nintendo game Ring Fit Adventure plus a collection of custom hardware to tie it all together. That hardware senses cadence on the stationary bike, watches for the user to squeeze the handheld wheel controller, and translates those inputs to button presses on the controller to play the game.
Shoulder button pusher in green
The most fascinating element of this project is the TAPBO module which adapts the Joy-Con controller to remote input. The module includes electronics, actuators, and a clever mechanical design to allow it to be mounted to the Ring-Con in place of an unmodified Joy-Con. Electrically the components will be familiar to regular Hackaday readers; there is a breakout board for a Teensy which also holds an XBee module to receive inputs remotely and drive a pair of servos. The entire module is described in detail starting at 4:42 in the video.
Mechanically the TAPBO relies on a pair of cam-actuated arms which translate rotational servo motion into linear action to press shoulder or face buttons. The module directly measures flex of the Ring-Con with an added flexible resistor and receives cadence information from another module embedded in the stationary bike via Zigbee. When these inputs exceed set thresholds they drive the servos to press the appropriate controller buttons to accelerate or use an item.
We’ve focused pretty heavily on the technical aspects of this project, but this significantly undersells the level of polish and easy to understand documentation [Mike] has produced. It includes a TAPBO Amiibo in customized packaging, and more. Check out the full video to get the complete scope of this project.