This week Jonathan Bennett and Dan Lynch sit down with Andy Stewart to talk about Andy’s Ham Radio Linux (AHRL)! It’s the Linux distro designed to give hams the tools they need to work with their radios. What’s it like to run a niche Linux distro? How has Andy managed to keep up with this for over a decade? And what’s the big announcement about the project breaking today?
Many beginner woodworkers, looking to offset the introductory costs of starting a hobby, will source their wood from pallets. Generally they’re easily found and can be low or no cost, but typically require a bit of work before they’re usable in a project. [Garage Avenger] is looking to do something a little outside of the box with his pallet project, though. He’s using raw pallets as a chassis for a four-speed go-kart, partially for the challenge and excitement and also to one-up a Pinterest post.
Almost immediately, though, the other major downside of working with pallets arose which is that they’re generally built out of low-grade pine which is soft and flexible. Flexibility is generally not a good thing to have in a vehicle frame so plenty of the important parts of this build were strengthened with steel tubing including the rear axle, steering mounts, and a few longitudinal supports to strengthen the overall frame. After working out some kinks with ordering a few of the wrong parts, and mounting the steering box backwards, it was time to test out the four-speed engine (and brakes) on the the go-kart, making it nearly ready for the road.
To complete the build, some tidying of wiring and fuel lines was done, along with improving some of the non-critical parts of the build like the bucket seat. Of course, adding pallet spoilers and body kit puts the finishing touches on the build and the go-kart is finally ready to tear up the local go-kart track and the less-inspiring Pinterest projects. [Garage Avenger] is no stranger to strange vehicle builds, either. Although it’s a bit out of season for most of our northern hemisphere readers now, his jet-powered street sled is still worth a view.
When a friend of [Lawrence Kesteloot] found a stack of 3.5″ floppy disks, they found that it contained Turbo Pascal code which the two of them had worked on back in the Summer of 1989. Amidst reminiscing about the High School days and watching movies on VHS, [Lawrence] sought a way to bring these graphical applications once more back to life. Not finding an easy way to compile Turbo Pascal code on Mac even back in 2013 when he started the project, he ended up writing a Turbo Pascal compiler in JavaScript, as any reasonable person would do in this situation.
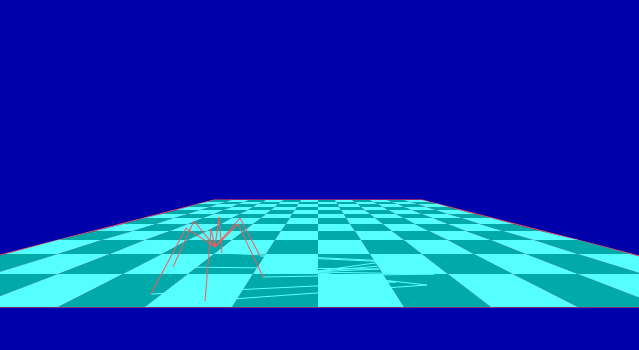
SPIDER.PAS in its full glory. (Credit: Lawrence Kesteloot)
As noted by [Lawrence], the compiler doesn’t implement the full Turbo Pascal 5.5 language, but only the subset that was required to compile and run these applications which they had found on the floppy disks. These include ROSE.PAS and SPIDER.PAS along with three others, and can also be found in the GitHub repository. As can be seen in the online version of the compiler, it captures the feel of programming Pascal in 1989 on the command line.
Naturally, the software situation has changed somewhat over the last decade. We’ve recently seen some promising multi-platform Pascal compilers, and of course you could even run Turbo Pascal in DOSBox or similar. That might make this project seem irrelevant, but being able to write and run Pascal applications in more ways and on more platforms is never a bad thing.
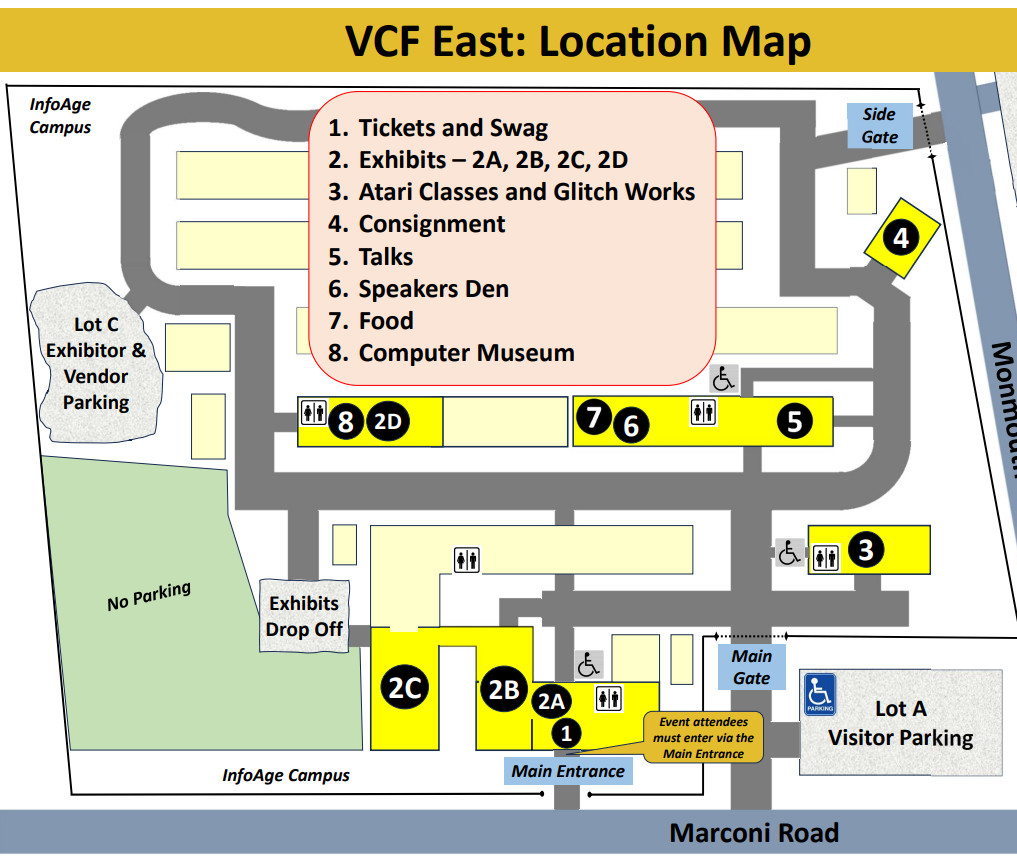
I knew something had changed before I even paid for my ticket to this year’s Vintage Computer Festival East at the InfoAge Science and History Museum in Wall, New Jersey.
Over the last couple of years, attendance has been growing to the point that parking in the lot directly next to the main entrance has been reserved for only the earliest of risers. That hasn’t described yours truly since the days when I still had what my wife refers to as a “real job”, so that’s meant parking in the overflow lot down the road and walking the half a mile or so back to the main gate. Penance for working on the Internet, let’s call it.
But this time, while walking along the fence that surrounds the sprawling InfoAge campus, I came across an open gate and a volunteer selling tickets. When commenting to her that this was a pleasant surprise compared to the march I’d anticipated, she responded that there had been so many people trying to get into the main entrance that morning that they decided to station her out here to handle the overflow.
I was a few steps past her table and into InfoAge before the implications of this interaction really hit me. Two entrances. How many attendees does there need to be before you setup a secondary ticket booth out by the reserve parking lot just to keep things moving smoothly? Well, I can’t tell you what the exact number is. But after spending the rest of the day walking between all the buildings it took to contain all of the exhibits, talks, and activities this year, I can tell you it’s however many people came to VCF East 2024.
Compared to its relatively humble beginnings, it’s incredible to see what this event has grown into. InfoAge was packed to the rafters, and despite what you might think about a festival celebrating decades old computing hardware, there were plenty of young faces in the crowd. I’m not sure exactly what’s changed, but the whole place was positively jumping. Perhaps it’s partially the generational nostalgia that’s kept Netflix cranking out new seasons of the 1980’s set Stranger Things. I’m sure attention (and attendance) from several well known YouTube personalities have played a big part as well.
Whatever the magic formula that’s turned what was once a somewhat somber retrospective on early desktop computers into a major destination for tech lovers, I’m all for it. Love Live the Vintage Computer Festival!
Riley, an 8 lb pug, has more beauty than brains, and a palate as unrefined as crude oil. While we hate criticizing others’ interests and tastes, his penchant for eating cat poop needed to stop. After a thorough exploration of a variety of options, including cat food additives that make its excrement taste worse (HOW? WHY? Clearly taste wasn’t the issue!), automatic litter boxes that stow the secretions, and pet doors that authenticate access to the room with the litter box, [Science Buddies] eventually settled on a solution that was amenable to all members of the family.
The trick was in creating a door mechanism with a blacklist of sorts rather than a whitelist. As the cat didn’t like to push the door open itself, the solution needed to have the pet door open by default. A magnet on Riley’s collar would trip a sensor attached to an Arduino that would control servos to swing the door shut immediately if he attempted to access the defecated delights. Of course safety was a consideration with the door swinging in Riley’s face.
In the previous two HID articles, we talked about stealing HID descriptors, learned about a number of cool tools you can use for HID hacking on Linux, and created a touchscreen device. This time, let’s talk about an underappreciated HID standard, but one that you might be using right now as you’re reading this article – I2C-HID, or HID over I2C.
HID as a protocol can be tunneled over many different channels. If you’ve used a Bluetooth keyboard, for instance, you’ve used tunneled HID. For about ten years now, I2C-HID has been heavily present in laptop space, it was initially used in touchpads, later in touchscreens, and now also in sensor hubs. Yes, you can expose sensor data over HID, and if you have a clamshell (foldable) laptop, that’s how the rotation-determining accelerometer exposes its data to your OS.
This capacitive touchscreen controller is not I2C-HID, even though it is I2C. By [Raymond Spekking], CC-BY-SA 4.0Not every I2C-connected input device is I2C-HID. For instance, if you’ve seen older tablets with I2C-connected touchscreens, don’t get your hopes up, as they likely don’t use HID – it’s just a complex-ish I2C device, with enough proprietary registers and commands to drive you crazy even if your logic analysis skills are on point. I2C-HID is nowhere near that, and it’s also way better than PS/2 we used before – an x86-only interface with limited capabilities, already almost extinct from even x86 boards, and further threatened in this increasingly RISCy world. I2C-HID is low-power, especially compared to USB, as capable as HID goes, compatible with existing HID software, and ubiquitous enough that you surely already have an I2C port available on your SBC.
In modern world of input devices, I2C-HID is spreading, and the coolest thing is that it’s standardized. The standardization means a lot of great things for us hackers. For one, unlike all of those I2C touchscreen controllers, HID-I2C devices are easier to reuse; as much as information on them might be lacking at the moment, that’s what we’re combating right now as we speak! If you are using a recent laptop, the touchpad is most likely I2C-HID. Today, let’s take a look at converting one of those touchpads to USB HID.
There are many facets to being a radio hobbyist, but if you’ve ever had the urge to dabble in radio astronomy, check out “The Novice’s Guide to Amateur Radio Astronomy,” a presentation at the 2024 conference of the Society of Amateur Radio Astronomers. In that presentation (see the video below), [Nathan Butts] covers everything from why you should take up the hobby, how to set up a software defined radio (SDR) receiver, and how to repurpose old computers. This is just one of a series of videos recently posted from the conference — check out their channel to see them all.
Unlike optical astronomy, you can listen to the universe by radio during the day or night, rain or shine. You don’t need a dark sky, although these days, a quiet radio location might be hard to find. [Nathan] also points out that some people just want to crunch data collected by others, and that’s fun, too. There are many ways to get involved from designing hardware, writing software, or — of course — just listening.
It has never been easier to get involved. Cheap software-defined radios are perfect for this sort of work, and we all have massive computers and scores of small data-collection computers. Maybe you’ll be the next person to hear a Wow signal. If you are worried about fielding an antenna, many people repurpose satellite dishes.