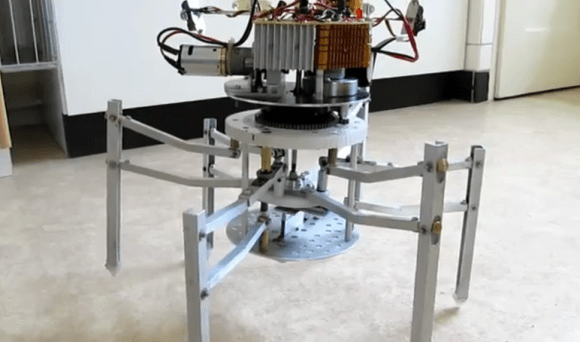
Many if not most good hacks come from scrap or unused parts, but this hexapod robot takes it to a new level. [Helmut] wrote in to tell us about his ‘bot built from discarded electronics. As with most of the little walkers that we’ve featured here, this robot features some basic obstacle avoidance with a sensor array on the head unit.
The way the head controls this robot is really the interesting thing about this setup.Rather than send a signal to tell servo motors to walk in a certain gait, the head physically tilts in the direction that it should go. Although it’s somewhat hard to tell, it appears that a driving motor in the head assembly pushes a sort of camshaft down into the body. This is then mechanically coupled to the legs causing it to walk in the correct direction.
Be sure to check out the videos after the break, featuring narration by a computer in English, or by a human in German if you happen to sprechen sie Deutsch. Continue reading “A Hexapod Robot Made From Scrap”















