Seeing airplanes fly in formation is an exciting experience at something like an air show, where demonstrations of a pilot’s skill and aircraft technology are on full display. But there are other reasons for aircraft to fly in formation as well. [Peter] has been exploring the idea that formation flight can also improve efficiency, and has been looking specifically at things like formation flight of UAVs or drones with this flight planning algorithm.
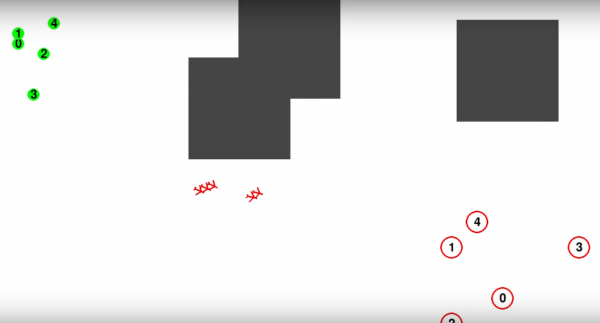
Aircraft flying in formation create vortices around the wing tips, which cause drag. However, another aircraft flying through those vortices will experience less drag and more efficient flight. This is the reason birds instinctively fly in formation as well. By planning paths for drones which will leave from different locations, meet up at some point to fly in a more efficient formation, and then split up close to their destinations, a significant amount of energy can potentially be saved. Continue reading “Formation Flying Does More Than Look Good”