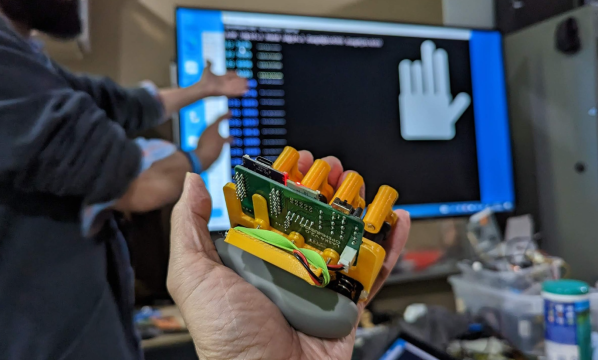
What do you get when you combine an ESP32-S2, a machine-learning model, some Hall effect sensors, and a grip exercise toy? [Turfptax] did just that and created LASK4. The four springs push down pistons with tiny magnets on them. Hall effect sensors determine the piston’s position, and since the springs are linear, the ESP32 can also estimate the force being applied on a given finger. This data is then streamed to a nearby computer over TCP. A small OLED screen shows the status, and a tidy 3D printed case creates a comfortable package.
So other than an excellent musical instrument, what is this good for? First, it creates well-labeled training data when combined with what is collected by the muscle sensor band we discussed previously. The muscle band measures various pressure sensors radially around the forearm. With just a few minutes of training data, the system can accurately predict finger movement using the random forest regression model.
What would you use it for? It’s considered a somatosensory device, so it can be used for physical therapy when undergoing hand rehabilitation, as it provides feedback during sessions. Or it could be used to train a controller efficiently.
It’s an exciting project on GitHub under an OpenCERN hardware license. The code is in MicroPython, and the PCB and STL files are included. We’re looking forward to seeing what else comes from the project. After the break, there’s a progress update video.
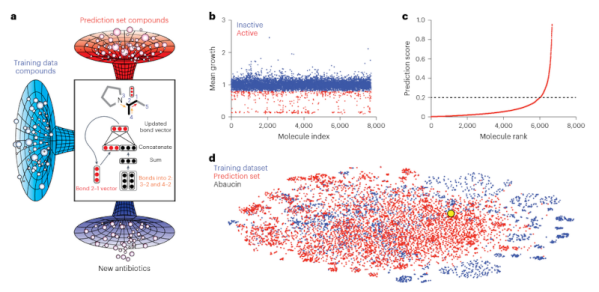
Researchers in Canada and the United States have used deep learning to derive an antibiotic that can attack a resistant microbe, acinetobacter baumannii, which can infect wounds and cause pneumonia. According to the BBC, a paper in Nature Chemical Biology describes how the researchers used training data that measured known drugs’ action on the tough bacteria. The learning algorithm then projected the effect of 6,680 compounds with no data on their effectiveness against the germ.
In an hour and a half, the program reduced the list to 240 promising candidates. Testing in the lab found that nine of these were effective and that one, now called abaucin, was extremely potent. While doing lab tests on 240 compounds sounds like a lot of work, it is better than testing nearly 6,700.
Interestingly, the new antibiotic seems only to be effective against the target microbe, which is a plus. It isn’t available for people yet and may not be for some time — drug testing being what it is. However, this is still a great example of how machine learning can augment human brainpower, letting scientists and others focus on what’s really important.
WHO identified acinetobacter baumannii as one of the major superbugs threatening the world, so a weapon against it would be very welcome. You can hope that this technique will drastically cut the time involved in developing new drugs. It also makes you wonder if there are other fields where AI techniques could cull out alternatives quickly, allowing humans to focus on the more promising candidates.
Want to catch up on machine learning algorithms? Google can help. Or dive into an even longer course.
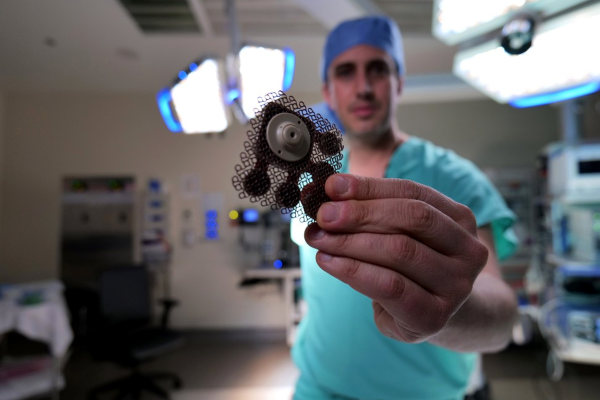
It perhaps goes without saying that one nuclear bomb can really ruin your day. The same is true for non-nuclear dirty bombs, which just use conventional explosives to disperse radioactive material over a wide area. Either way, the debris scattered by any type of radiation weapon has the potential to result in thousands or perhaps millions of injuries, for which modern medicine offers little in the way of relief.
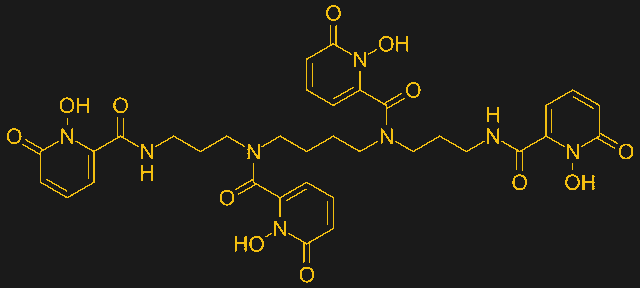
HOPO 14-1, aka 3,4,3-Li(1,2-HOPO). The four hydroxypyridinone groups do the work of coordinating radioactive ions and making them soluble so they can be eliminated in urine.
But maybe not for long. A Phase 1 clinical trial is currently underway to see if an oral drug is able to scour radioactive elements from the human body. The investigational compound is called HOPO 14-1, a chelating agent that has a high affinity for metals in the actinide series, which includes plutonium, uranium, thorium, and cerium curium. Chelating agents, which are molecules that contain a multitude of electron donor sites, are able to bind to positively charged metal ions and make the soluble in aqueous solutions. Chelators are important in food and pharmaceutical processing — read the ingredients list on just about anything from a can of soda to a bottle of shampoo and you’re likely to see EDTA, or ethylenediaminetetraacetic acid, which binds to any metal ions that make it into the product, particularly iron ions that come from the stainless steel plumbing used in processing equipment.
The compound under evaluation, HOPO 14-1, is a powerful chelator of metal ions. Its structure is inspired by natural chelators produced by bacteria and fungi, called siderophores, which help the microorganisms accumulate iron. Its mechanism of action is to sequester the radioactive ions and make them soluble enough to be passed out of the body in the urine, rather than to have the radioactive elements carried around the body and incorporated into the bones and other tissues where they can cause radiation damage for years.
HOPO 14-1 has a number of potential benefits over the current frontline chelator for plutonium and uranium toxicity, DTPA or diethylenetriaminepentaacetic acid. Where DTPA needs to be injected intravenously to be effective, HOPO 14-1 can be made into a pill, making stockpiling and administering the drug easier. If, of course, it passes Phase 1 safety trials and survives later trials to determine efficacy.
When forgetting to take medication on time can lead to a bad day or night, having a helper to keep you on track can greatly improve your life. [M. Bindhammer] faces this scenario every day, so he built his own robotic pill dispenser.
The core of the project is a 3D printed dispensing drum with individual pockets for morning and evening medication. It is mounted directly to a 360° winch servo, normally used for RC sailboats, while a second conventional servo opens a small sliding door to drop the pills onto the dispensing tray. The tray integrates a sensitive touch sensor which can detect when [M] picks up the pills, without being triggered by the pills themselves.
[M. Bindhammer] also included a small but loud speaker, connected to a speech synthesis module for audio reminders. The main controller is a Arduino Due with a custom breakout shield that also integrates a DS3231 real time clock. All the electronics are enclosed in a 80’s style humanoid robot-shaped body, with dispensing drum on its chest, and an OLED screen as it’s face.
The end result is a very polished build, which should make [M. Bindhammer]’s life with bipolar disorder a little bit easier, and he hopes it might help others as well.
In the constant pursuit of innovation, it’s easy to overlook the wisdom of the past. The scientific method and modern research techniques have brought us much innovation, which can often lead us to dismiss traditional cultural beliefs.
However, sometimes, there are still valuable kernels of truth in the folklore of yesteryear. This holds true in a medical study from Finland, which focused on the traditional use of spruce resin to treat chronic wounds, breathing new life into an age-old therapy.
The brain is a rather important organ, and as such, nature has gone to great lengths to protect it. The skull provides physical protection against knocks and bumps, but there’s a lesser-known defense mechanism at work too: the blood-brain barrier. It’s responsible for keeping all the nasty stuff – like bacteria, viruses, and weird chemicals – from messing up your head.
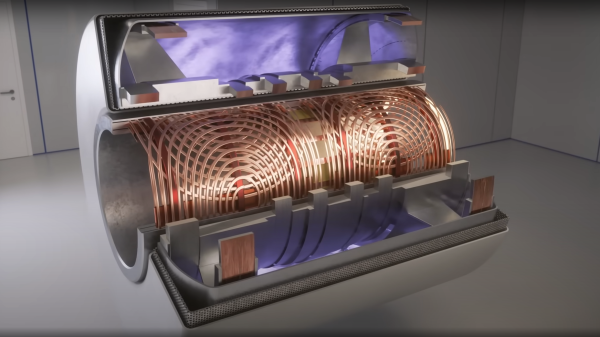
Of all the high-tech medical gadgets we read about often, the Magnetic Resonance Imaging (MRI) machine is possibly the most mysterious of all. The ability to peer inside a living body, in a minimally invasive manner whilst differentiating tissue types, in near real-time was the stuff of science fiction not too many years ago. Now it’s commonplace. But how does the machine actually work? Real Engineering on YouTube presents the Insane Engineering of MRI Machines to help us along this learning curve, at least in a little way.
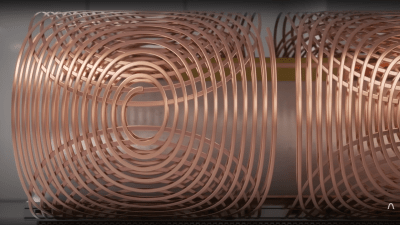
Both types of gradient coil are stacked around the subject inside the main field coil
The basic principle of operation is to align the spin ‘axis’ of all the subject’s hydrogen nuclei using an enormous magnetic field produced by a liquid-helium-cooled superconducting electromagnet. The spins are then perturbed with a carefully tuned radio frequency pulse delivered via a large drive coil.
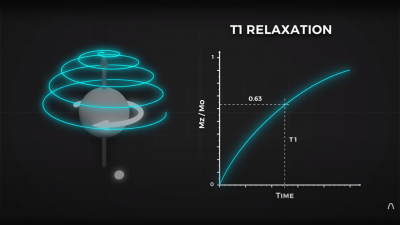
After a short time, the spins revert back to align with the magnetic field, remitting a radio pulse at the same frequency. Every single hydrogen nucleus (just a proton!) responds at roughly the same time, with the combined signal being detected by the receive coil (often the same physical coil as the driver.)
Time taken for the perturbed spin to return to magnetic alignment
There are two main issues to solve. Obviously, the whole body section is ‘transmitting’ this radio signal all in one big pulse, so how do you identify the different areas of 3D space (i.e. the different body structures) and how do you differentiate (referred to as contrast) different tissue types, such as determine if something is bone or fat?
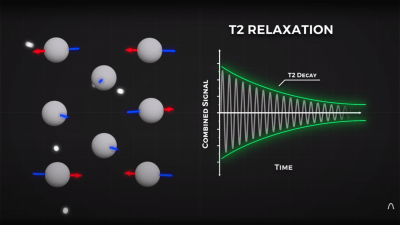
By looking at the decay envelope of the return pulse, two separate measures with different periods can be determined; T1, the spin relaxation period, and T2, the total spin relaxation period. The first one is a measure of how long it takes the spin to realign, and the second measures the total period needed for all the individual interactions between different atoms in the subject to settle down. The values of T1 and T2 are programmed into the machine to adjust the pulse rate and observation time to favor the detection of one or the other effect, effectively selecting the type of tissue to be resolved.
Time taken for the relative phasing inside a tissue locality to settle down to the same average spin alignment
The second issue is more complex. Spatial resolution is achieved by first selecting a plane to virtually slice the body into a 2D image. Because the frequency of the RF pulse needed to knock the proton spin out of alignment is dependent upon the magnetic field strength, overlaying a second magnetic field via a gradient coil allows the local magnetic field to be tuned along the axis of the machine and with a corresponding tweak to the RF frequency an entire body slice can be selected.
All RF emissions from the subject emanate from just the selected slice reducing the 3D resolution problem to a 2D problem. Finally, a similar trick is applied orthogonally, with another set of gradient coils that adjust the relative phase of the spins of stripes of atoms through the slice. This enables the use of a 2D inverse Fourier transform of multiple phase and frequency combinations to image the slice from every angle, and a 2D image of the subject can then be reconstructed and sent to the display computer for the operator to observe.