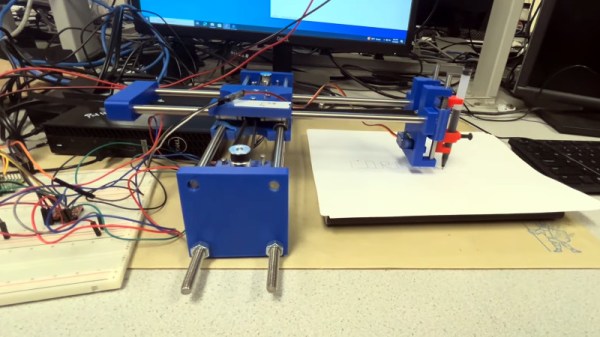
There are enough off-the-shelf CoreXY mechanisms out there that for the cost of an AliExpress order it’s possible to quickly and cheaply make yourself a plotter. But [Koushani Das], [Mahathi Andavolu] and [Dengyu Tu] are completing their project for Cornell University’s ECE 5730 course, so of course they have designed one from the ground up. Happily for us it seems to be fairly easy to replicate, so you can build one too if it takes your fancy.
The write-up makes for an interesting dive into the nitty-gritty of design, for which we hope they managed to secure a decent grade. The hardware itself seems pretty straightforward as does the pair of stepper controllers and RP2040 they use to run the thing, and their explanation of the math behind the CoreXY coordinate system is genuinely interesting for those of us who’ve never taken the time to consider it.
All the good stuff can be found in a GitHub repository if you’d like to take this further, and meanwhile they’ve also put up a demo video which you can see below the break. We like this little plotter, and we hope others will take its design and run with it.
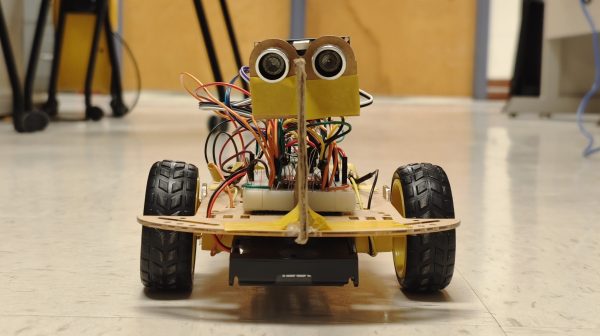
Once upon a time, the poor humans of the past had to lug around suitcases and trunks with their own arms. Then, some genius figured out that you could just put wheels on and make everyone’s life a million times easier. Now, what if you didn’t even have push, because your luggage could just follow you instead? Well, students [Yuqiang Ge] and [Yiyang Zhao] have figured out a proof of concept for how that could work.
Their build is a small robotic platform that they assembled for their ECE5730 final project. The tiny wheeled robot is programmed to rotate on the spot until its infrared sensors pick up a signal. In turn, the user is intended to carry an infared beacon for it to lock onto. A pair of sensors are used on the robot platform, separated by a board to serve as a blind. The robot determines the relative signal strength from each sensor, and uses that to vary PWM signals to the two DC drive motors to steer the robot platform to seek and follow the infrared beacon.
It’s a neat idea, and looks to work pretty well in a university corridor. It even has an ultrasonic range sensor to (ideally) stop when it gets too close to the user. Whether it would survive the tumult of a crowded airport is another thing entirely, but that’s what the engineering process is about. Indeed, the very concept has been commercialized already!
There are many places where you’d want to use remotely controlled robots, but perhaps forestry isn’t the first application to come to mind. Yet there are arguments to be made for replacing something like a big logging machine with grapple for a much smaller robot. The reduced ground pressure can be beneficial in fragile ecosystems, and removing the operator is much safer if felling a tree goes wrong.
This is where a US company called Forest Robots tried to come in, with their Logg Dogg, of which [Wes] over at Watch Wes Workfound a very unique prototype abandoned in a barn, courtesy of Zuckerberg’s marketplace of wonders.
One of the two receivers on the Forest Robots’ Logg Dogg logging robot prototype. (Credit: Watch Wes Work)
After lugging the poor abandoned robot back into a warm repair shop, he set to work on figuring out what it was that he had bought. At the time he knew only that it was some kind of logging robot, but with no model number or name on the robot, it was tough to find information. Eventually he got tipped off about it being the Logg Dogg, with even a video of the robot in action, helpfully uploaded to YouTube by [Hankey Mountain Garage] and embedded below for your viewing pleasure.
As [Wes] noticed during teardown and inspection was that it has that distinct mix-and-match feel to it of a prototype, ranging from metric and US customary bolts to both European and US/Canadian supplied components. Although it has two RF receivers on the device, no remote(s) came with the device, and the seller only knew that it was already in the barn when they purchased the place. After getting the engine working again on the robot, [Wes] contacted one of the people behind the robot: [Dean Edwards], a professor at the University of Idaho, hoping to learn more about this robot and how it ended up abandoned in a barn.
Hopefully we’ll find out in a Part 2 whether [Wes] got a response, and whether this robot will get a second chance at life. Meanwhile, in countries such as Portugal such robots are already finding significant use, including for fire protection in its forests, tackling difficult terrain more easily than humans. With forest fires an increasing risk, perhaps the Logg Dogg and kin could find a use there.
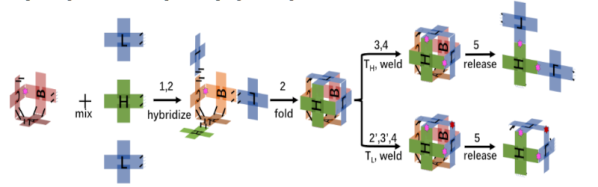
Hey, what if you could have a factory that makes robots that is run by… robots? This is hardly an original thought, but we are a long way from having an assembly line of C3POs self-replicating. On the other hand, animals — including humans — self-replicate all the time using DNA. Now, scientists are making tiny nanorobots from DNA that can assemble more DNA, including copies of themselves.
Assembling 3D structures with DNA has deep implications. For example, it might be possible to build drugs in situ, delivering powerful toxins only to cancer cells. Another example would be putting DNA factories in diabetes patients to manufacture the insulin they can’t.
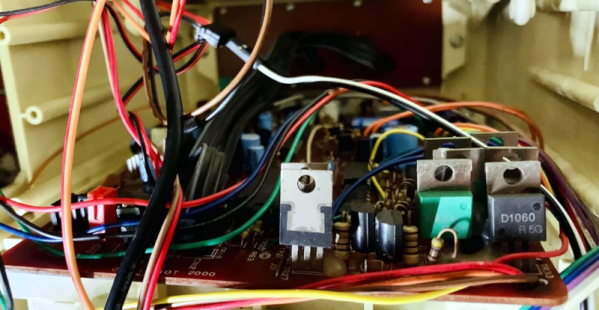
There were many toy robots back in the 80s that were — frankly — underwhelming by today’s standards. Back then, any old thing that rolled around with some blinking lights would impress, but the bar is higher today. Then again, some of the basic components won’t really change. You still need wheels, motors, batteries, and all that. But the computers we can bring to bear today are much better. Maybe that’s why so many people, including [mcvella], decide to give these venerable toys like the OmniBot 2000 a facelift or, maybe a better analogy, a brain transplant.
In this particular case, the brain in question is a Raspberry Pi. The robot will also sport new sensors, motor controllers, and a webcam. There is also a new battery pack in play. The project doesn’t cover working with the single powered gripper arm. The left arm isn’t motorized. There is also a cassette tape deck you could probably make do something interesting. Of course, with a Raspberry Pi, you get wireless control, and the project uses Viam to define and control the robot’s motion.
There is some retro cool factor to using a robot like Ominbot. However, we might be more tempted to just build our own. With a 3D printer, a laser cutter, and a few motors, you could make something that would be about equivalent or better with little effort.
We have seen OmniBot conversions before, particularly over on Hackaday.io. Maybe someone will convert one over to steam power.
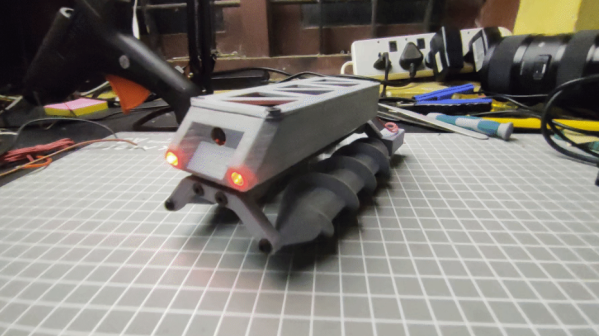
The build uses a Seeed Studio XIAO ESP32S3 as the brains of the operation. This provides wireless connectivity for remote control, as well as a way to get a low-latency video feed out of the robot from the OV2640 camera. The ESP32 controls a pair of brushed DC gearmotors via a DRV8833 motor driver. Each drives one of the two screws on the robot. By driving the two screws separately, the robot has simple skid steering. Two 18650 lithium-ion cells provide power for the robot, and are charged via a TP4056 battery charger module.
If you want to build a small robot that can handle soft terrain well, screw drives could be just the solution you’re looking for. They’re usually a bit slow, though, especially for human-scale conveyances, so don’t write off wheels or tracks if you don’t have to. And, of course, when your build is done, don’t forget to put it online and tell us all about it!
Generally, when we’re looking to build something that moves we reach for motors, servos, or steppers — which ultimately are all just variations on the same concept. But there are other methods of locomotion available. As [Jamie Matthews] demonstrates, Nitinol wires can be another way to help get things moving.
Nitinol is a type of metal wire made of nickel and titanium that is also known as “memory wire”, because it can remember its former shape and transition back to it with a temperature change. [Jamie] uses this property to create a simple hand that is actuated by pieces of wire sourced from Amazon. This is actually a neat way to go, as it goes some way to mimicking how our own hands are moved by our tendons.
[Jamie] does a great job of explaining how to get started with Nitinol and how it works in a practical sense. We’ve seen it put to some wacky uses before, too, such as the basis for an airless tire.