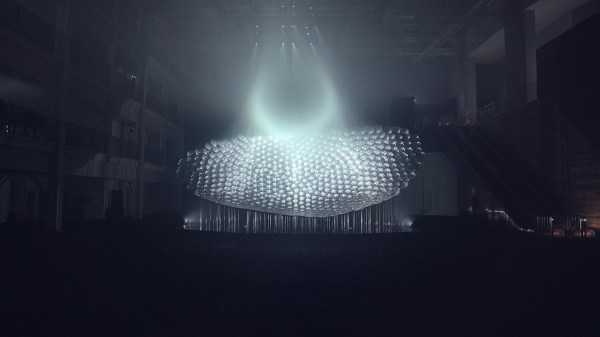
Part lightshow, part art piece, part exploratory technology, Light Barrier (third edition) by South Korean duo [Kimchi and Chips] crafts a visual and aural experience of ephemeral light structures using projectors, mirrors, and a light fog.
Presently installed at the ACT Center of Asia Culture Complex in Gwangju, South Korea, Light Barrier co-ordinates eight projectors, directing their light onto a concave cluster of 630 mirrors. As a result, an astounding 16 million ‘pixel beams’ of refocused light simulate shapes above the array. The array itself was designed in simulation using an algorithm which — with subtle adjustments to each mirror — “grew” the display so as to line up the reflecting vectors. Upon setup, final calibration of the display used Rulr to treat each ‘pixel beam’ as a ray in 3D space to ensure image accuracy once the show began. Check out a preview after the break! Continue reading “Shapes Made From Light, Smoke, And A Lot Of Mirrors”