[Aaron Rasmussen] and his friend [Eli] slapped together this setup to see what it would be like to run as much as their World of Warcraft characters. They used a couple old treadmills to spin some tires with makeshift mouse sensors on them. As their speed increased, so did their character. There was a decent amount of math done to figure the average speed of a World of Warcraft character, and ultimately they settled on 12 miles per hour. Not surprisingly, they found that too difficult due to the resistance in the rig as well as being out of shape. They ended up lowering the speed required to make their character go full sprint to 6 miles per hour.
Their final conclusion was that they could never run as much as their digital counterparts. Even if they were in really good shape. [Aaron] does say that it was fun enough to consider doing it regularly as a workout plan. He should wear the costume every time he uses it.
We’re often told that sitting is bad for our backs, for our necks, and even our general health. The standing desk aims to solve this by keeping us in a more vertical position while we work. [Joel Creates] took this a step further by creating a walking desk that’s motorized and keeps him on the move.
[Joel’s] build started with a standing desk. He then pulled off the desk’s standard wheels, and replaced them with motors sourced from cheap second-hand hoverboards and a couple of casters. The hoverboard wheels and casters were upgraded with pneumatic tires for the sake of a smoother ride, and control is via a thumbstick mounted on a mouse. Power is via a large bank of lithium-polymer batteries which are responsible for running the motors and the computer hardware which [Joel] uses to work on the go. A solar panel canopy helps top off the batteries when he’s out and about.
As you might imagine, a guy walking around trails with an entire computer desk draws a lot of attention. It’s probably not the best way to be productive, but it’s a neat way to integrate exercise into your routine if you’re always working at a computer. Somehow we suspect these might not catch on. Video after the break.
If you live somewhere prone to power outages, you might have thought about buying a generator. The problem is that small generators are cheap but — well — small. Big generators are expensive. [Jake von Slatt] had an idea. He has a “yard car” which we thought might be a junk car but, instead, it is an old car he uses to drive around his yard doing tasks. It has a winch and a welder. Now it has a big generator, too. You can follow the project in the three videos found below.
The project started with a scrap generator with a blown motor. Of course, the car has a motor so — in theory — pretty simple. Remove the generator from the motor and graft it to the car’s motor. But the details are what will kill you.
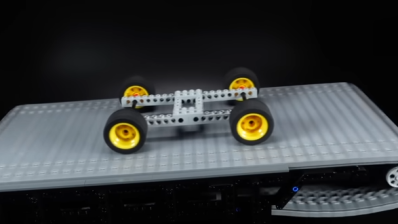
Cars (including LEGO ones) will roll downhill. In theory if the hill were a treadmill, the car could roll forever. In practice, there are a lot of things waiting to go wrong to keep this from happening. If you’ve ever wondered what those problems would be and what a solution would look like, [Brick Technology] has a nine-minute video showing the whole journey.
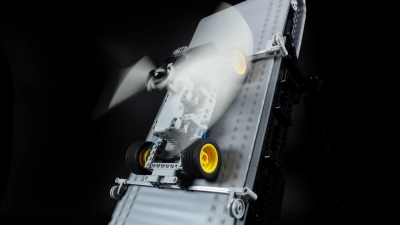
The video showcases an iterative process of testing, surfacing a problem, redesigning to address that problem, and then back to testing. It starts off pretty innocently with increasing wheel friction and adding weight, but we’ll tell you right now it goes in some unexpected directions that show off [Brick Technology]’s skill and confidence when it comes to LEGO assemblies.
How it started
How it’s going
You can watch the whole thing unfold in the video, embedded below. It’s fun to see how the different builds perform, and we can’t help but think that the icing on the cake would be LEGO bricks with OLED screens and working instrumentation built into them.
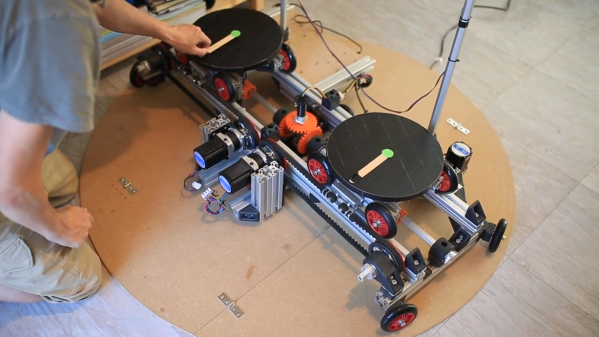
[Mark Dufour]’s TACO VR project is a sort of robotic platform that mimics an omnidirectional treadmill, and aims to provide a compact and easily transportable way to allow a user to walk naturally in VR.
Unenthusiastic about most solutions for allowing a user to walk in VR, [Mark] took a completely different approach. The result is a robotic platform that fits inside a small area whose sides fold up for transport; when packed up, it resembles a taco. When deployed, the idea is to have two disc-like platforms always stay under a user’s feet, keeping the user in one place while they otherwise walk normally.
It’s an ambitious project, but [Mark] is up to the task and the project’s GitHub respository has everything needed to stay up to date, or get involved yourself. The hardware is mainly focused on functionality right now; certainly a fall or stumble while using the prototype looks like it would be uncomfortable at the very best, but the idea is innovative. Continue reading “DIY Robotic Platform Aims To Solve Walking In VR”→
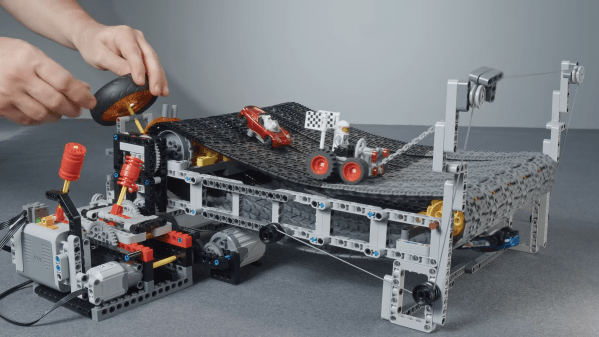
We’ve all played some variant of that simple old racing video game. It’s the one that involves swerving around cars in front without crashing, as the pace steadily increases further. [Dr. Engine] has recreated that very game in the physical world, with the help of LEGO Technic.
The design uses what appears to be a LEGO tank tread to create a treadmill for a LEGO car. The initial design is hand-cranked, but [Dr. Engine] soon upgrades this with a motor. The wide treadmill is then fitted with a steering wheel. This steers the car laterally along the treadmill via a simple pulley system. From there, it was a simple job of adding gearbox to change the speed of the treadmill, and obstacles for the car to dodge. Double-sided table affixed small die-cast cars to the track to fit the theme of the build.
It’s great fun watching the car buck and weave over the undulating track, and we’d certainly love to compete with friends for the high score. We’ve seen similar builds before, too, like this all-LEGO suspension dyno. Video after the break.