When you think of robots that were modeled after animals, a brittle star is probably not the first species that comes to mind. Still, this is the animal that inspired [Zach J. Patterson] and his research colleagues from Carnegie Mellon University for their underwater crawling robot PATRICK.
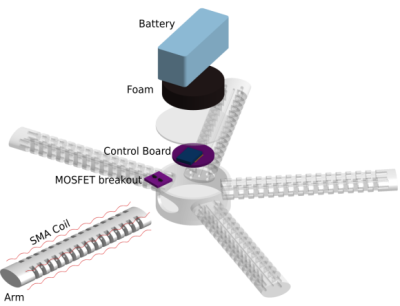
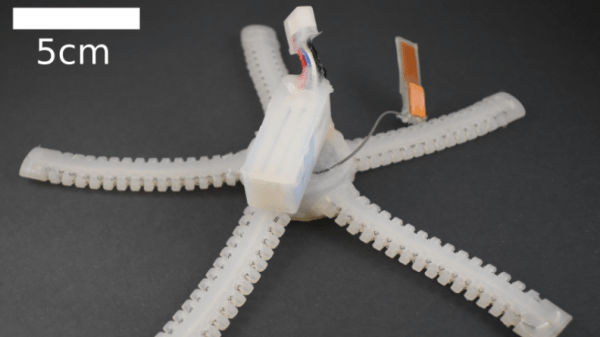
PATRICK is a soft robot made from molded silicone. Each of his five limbs contains several shape memory alloy (SMA) springs which can be contracted through Joule heating thereby causing the limbs to bend. The robot’s control board is sending and receiving commands via Bluetooth Low Energy from a nearby computer. To control PATRICK’s motion the researchers constructed a closed-loop system where an offboard OpenCV based camera system is constantly tracking the robot. As shown in the video below with an average velocity of 1 cm/s, PATRICK’s movement is a bit sluggish but the system is supposedly very robust against uncertainties in the environment.
In the future [Zach J. Patterson et al.] would like to improve their design by giving the robot the ability to grasp objects. Ultimately, also the offboard camera should be replaced with onboard sensors so that PATRICK can navigate autonomously.
Soft robots like artificial jellyfish are especially useful underwater and sometimes almost cross the boundary to organic life.
Continue reading “Underwater Crawling Soft Robot Stays In Shape”




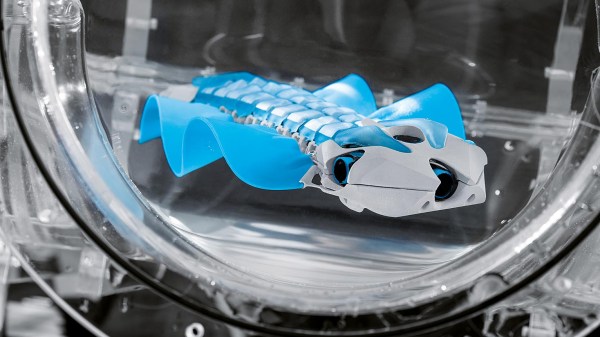
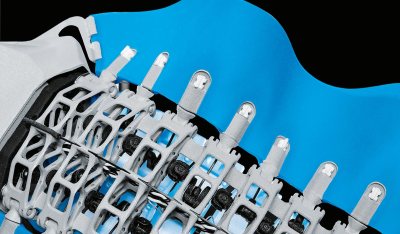 What was their elegant solution for making the fins undulate? Nine lever arms are attached to each fin. Those lever arms are controlled by two crankshafts which extend from the front of the body to the rear, one for each side. A servo motor then turns each crankshaft. Since the crankshafts are independent, that means each fin operates independently. This allows for turning by having one fin move faster than the other. A third motor in the head flexes the body, causing the robot to swim up or down.
What was their elegant solution for making the fins undulate? Nine lever arms are attached to each fin. Those lever arms are controlled by two crankshafts which extend from the front of the body to the rear, one for each side. A servo motor then turns each crankshaft. Since the crankshafts are independent, that means each fin operates independently. This allows for turning by having one fin move faster than the other. A third motor in the head flexes the body, causing the robot to swim up or down.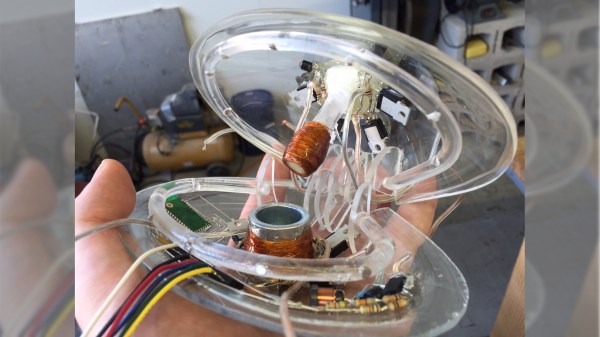
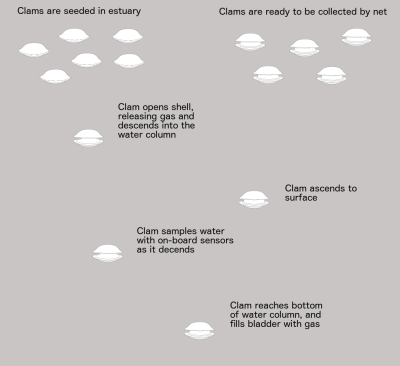 The clams contain the electronics, sensors, and means of descending and ascending within their shells. A bunch of them are dropped overboard on the surface. Their shells open, allowing the gas within to escape and they sink. As they descend they sample the water. When they reach the bottom, gas fills a bladder and they ascend back to the surface with their data where they’re collected in a net.
The clams contain the electronics, sensors, and means of descending and ascending within their shells. A bunch of them are dropped overboard on the surface. Their shells open, allowing the gas within to escape and they sink. As they descend they sample the water. When they reach the bottom, gas fills a bladder and they ascend back to the surface with their data where they’re collected in a net.












