Dragsters are typically about peak performance on a tarmac drag strip. [Engineering After Hours] took a different tack, though, building a radio-controlled amphibious dragster intended to cross small bodies of water.
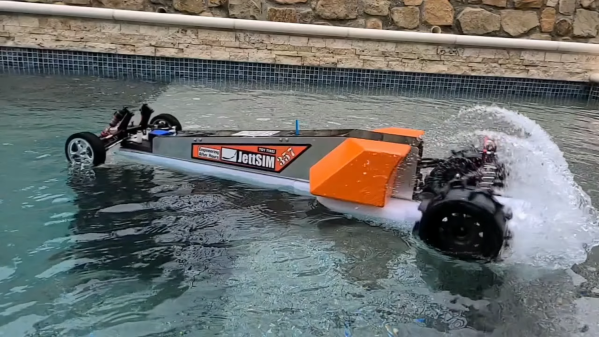
The build is based on a Traxxas Raptor RC car. However, it’s been heavily reworked from a pickup-like design to become a dragster with a motor mounted in the rear. It’s also been fitted with a foam underbody to allow it to float when stationary. The rear tires have been replaced with 3D-printed versions with large paddles, which provide propulsion in the water.
Initial tests showed the car struggled to make progress in the water, as the paddle tires tended to drag the rear end deeper under water. The tiny dragster tires up front didn’t help it steer, in water either. Large foam discs were added to the front tires to enable them to act as better rudders.
Fitted with its water tires and foam floatation aids, the car can only drive slowly on land, but [Engineering After Hours] points out this is enough to call it amphibious. It does a better job at skittering around on water, and it was able to cross a local pond at low speed.
We’ve seen some other creative techniques for making amphibious vehicles, like these crazy star-shaped wheels. Video after the break.