[Ben Katz] is building a running robot from hobby level brushless motors, all on his blog under the tag, “HobbyKing Cheetah.”
One of the features of fancy modern industrial motor and controller sets is the ability for the motor to act as a mass-spring-damper. For example, let’s say you want a robot to hold an egg. You could have it move to the closed position, but tell the controller you only want to use so much force to do it. It will hold the egg as if there was a spring at its joint.
Another way you could use this is in the application of a robot leg. You tell the controller what kind of spring and shock absorber (damper) combination it is and it will behave as if those parts have been added to the mechanism. This is important if you want a mechanical leg to behave like a biological leg.
[Ben] had worked on a more formal project which used some very expensive geared motors to build a little running robot. It looks absolutely ridiculous, as you can see in the following video, but it gives an idea of where he’s going with this line of research. He wanted to see if he could replace all those giant geared motors with the cheap and ubiquitous high performance brushless DC motors for sale now. Especially given his experience with them.
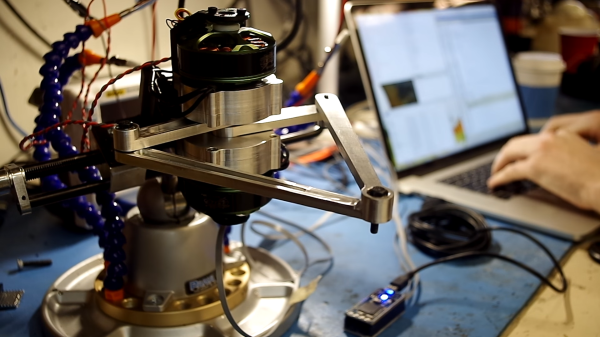
So far he’s done a very impressive amount of work. He’s built a control board. He’s characterized different motors for the application. He’s written a lot of cool software; he can even change the stiffness and damping settings on the fly. He has a single leg that can jump. It’s cool. He’s taking a hiatus from the project, but he’ll be right back at it soon. We’re excited for the updates!









