TL;DR — when [Colin Furze] is your “safety inspector,” you really should be reconsidering your project goals.
Most of us have probably by now seen the SawStop brand of self-stopping table saw, which detects when something meatier than wood has the bad taste to touch the spinning blade, more or less instantly stopping it and preventing sudden traumatic amputations. It’s an outstanding idea, and we’d love to see the technology built into all table saws. But alas, SawStop saws are priced out of reach for many woodworkers, which left [Ruth Amos] to roll her own DIY version of the system.
It should be stated right off the bat that none of what [Ruth] does here is a good idea, and that everything shown is really just a proof of concept. The basis for her build was a somewhat flimsy-looking contractor-style saw, to which [Ruth] attached an Arduino set up to detect when something conductive touches the blade. She shares no particulars on the sensing method, but our guess is capacitive coupling. She then sets about experimenting with a series of above-table gizmos to arrest the blade, with limited success, plus all the attachments would make the saw essentially useless. But working above the table does make sense in the prototyping phase, and allowed her to figure out what wouldn’t work.
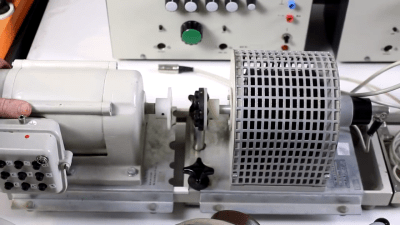
In the end, it was an electromagnetic clutch from an electric lawnmower that seemed to do the trick, albeit at the expense of heavy mods to the saw and a considerable increase in the system’s angular momentum. Nonetheless, the blade stops pretty close to instantly in the old hot dog test. It doesn’t drop the blade below the table, of course, and the hot dog is a little worse for the wear, but it’s still pretty impressive.
We’ve discussed SawStop’s technology before and why it isn’t perhaps as widely available as it should be, if you’re curious.
Continue reading “Homemade SawStop Attachment Is Just About As Sketchy As It Sounds”