Not satisfied with the specs of off-the-shelf brushless DC motors? Looking to up the difficulty level on your next quadcopter build? Or perhaps you just define “DIY” as rigorously as possible? If any of those are true, you might want to check out this hand-wound, 3D-printed brushless DC motor.
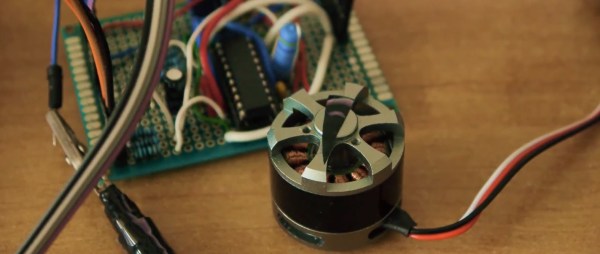
There might be another reason behind [Christoph Laimer]’s build — moar power! The BLDC he created looks more like a ceiling fan motor than something you’d see on a quad, and clocks in at a respectable 600 watts and 80% efficiency. The motor uses 3D-printed parts for the rotor, stator, and stator mount. The rotor is printed from PETG, while the stator uses magnetic PLA to increase the flux and handle the heat better. Neodymium magnets are slipped into slots in the rotor in a Halbach arrangement to increase the magnetic field inside the rotor. Balancing the weights and strengths of the magnets and winding the stator seem like tedious jobs, but [Cristoph] provides detailed instructions that should see you through these processes. The videos below shows an impressive test of the motor. Even limited to 8,000 rpm from its theoretical 15k max, it’s a bit scary.
Looking for a more educational that practical BLDC build? Try one cobbled from PVC pipes, or even this see-through scrap-bin BLDC.
Continue reading “Powerful, Professional Brushless Motor From 3D-Printed Parts”


 A warning is warranted – this is not for the faint of heart. You can easily destroy your microcontroller if you’re not careful. [Ignas] added several current limiting resistors and capacitors as advised in the
A warning is warranted – this is not for the faint of heart. You can easily destroy your microcontroller if you’re not careful. [Ignas] added several current limiting resistors and capacitors as advised in the