Students at the University of Illinois at Urbana-Champaign have a brain-computer interface that can measure brainwaves. What did they do with it? They gave it to Alma, a golden labrador, as you can see in the video below. The code and enough info to duplicate the electronics are on GitHub.
Of course, the dog doesn’t directly generate speech. Instead, the circuit watches her brainwaves via an Arduino and feeds the raw data to a Raspberry Pi. A machine learning algorithm determines Alma’s brainwave state and plays prerecorded audio expressing Alma’s thoughts.
Part of the joy of owning a dog is feeding it. How often do you get to make another living being that happy? However, sometimes you can’t be there when your best friend is hungry. [El Taller De TD] built an auto dog feeder using an Arduino and stepper motor. The video and links are in Spanish, but if your Spanish is rusty, YouTube’s caption autotranslation isn’t bad and Google Translate can help you with the web site.
The electronics are reasonably simple: an Arduino, a Bluetooth module, and a stepper motor driver. Mechanically, the motor and some PVC pipe are all you need. There’s a small phone application to drive the Bluetooth using App Inventor.
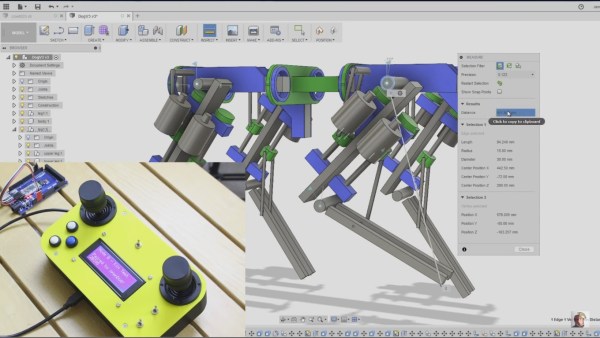
There was a time when a two-legged walking robot was the thing to make. But after seeing years of Boston Dynamic’s amazing four-legged one’s, more DIYers are switching to quadrupeds. Now we can add master DIY robot builder [James Bruton] to the list with his openDog project. What’s exciting here is that with [James’] extensive robot-building background, this is more like starting the challenge from the middle rather than the beginning and we should see exciting results sooner rather than later.
James’ motor and ball screws
Thus far [James] has gone through the planning stage, having iterated through a few versions using Fusion 360, and he’s now purchased the parts. It’s going to be about the same size as Boston Robotic’s SpotMini and uses three motors for each leg. He considered going with planetary gearboxes on the motors but experienced a certain amount of play, or backlash, with them in his BB-9E project so this time he’s going with ball screws as he did with his exoskeleton. (Did we mention his extensive background?)
Each leg is actually made up of an upper and lower leg, which means his processing is going to have to include some inverse kinematics. That’s where the code decides where it wants the foot to go and then has to compute backwards from there how to angle the legs to achieve that. Again drawing from experience when he’s done it the hard way in the past, this time he’s designed the leg geometry to make those calculations easy. Having written up some code to do the calculations, he’s compared the computed angles with the measurements he gets from positioning the legs in Fusion 360 and found that his code is right on. We’re excited by what we’ve seen so far and bet it’ll be standing and walking in no time. Check out his progress in the video below.
Does your pet get distressed when you’re not home? Or, perhaps their good behaviour slips when you’re not around and they cause a ruckus for the neighbours. Well, [jenfoxbot] has just such a dog, so she built a ‘bark back’ IoT pet monitor to keep an eye on him while she’s out.
The brains and backbone of the pet monitor is the ever-popular Raspberry Pi 3. A Sparkfun MEMS microphone breakout board listens for any unruly behaviour, with an MCP3002 analog to digital converter chip reading the mic input. Some trial-and-error coding allowed her to set a noise threshold that — once exceeded — will trigger an audio file, shushing her dog. It also logs events and uploads any status updates to a CloudMQTT server to be monitored while away from home. Her Imgur build album can be found here, and the GitHub project page is here if you want to build your own!
Check out the demo video after the break, that was probably confusing for her good dog, Marley.
[Divconstructors] cashed in after Halloween and picked up a skeleton dog prop from the Home Depot, for the simple and logical purpose of turning it into a robot.
The first step was to cut apart the various body parts, followed by adding bearings to the joints and bolting in a metal chassis fabricated from 1/8″ aluminum stock. This is all pretty standard stuff in the Dr. Frankenstein biz. For electronics he uses a Mega with a bark-emitting MP3 shield on top of it. Separately, a servo control board manages the dozenish servos — not to mention the tail-wagging stepper.
[Divconstructors] actually bought two skeletons, one to be his protoype and the other to be the nice-looking build. However, we at Hackaday feel like he might have missed an opportunity: As any necromancer can tell you, a freakish combination of two skeletons beats out two normal skeletons any night of the week. Also, two words for you to consider: cyberdog ransomeware. We imagine you don’t really feel ransomware until there’s the family robodog ready to test out its high-torque jaw servos on your flesh. Of course if he were a real dog we could either remotely control him with a hot dog, or just give him a talking collar.
[Johan Beyers] built an elegantly simple Dog Speedometer project that uses a POV display to display a running dog’s speed without the benefit of an accelerometer. Using an Arduino (looks like it might be a D-love) and a line of 5 LEDs, [Johan] built a dirt-simple POV — 39 lines of code — that times out the flashes so that an immobile viewer sees the dog’s speed. How do you know your pup’s loping speed? That’s the beauty of this project.
Instead of putting all of the LEDs in a line, they are arranged in a V-shape. Because of this spatial offset, the patterns flashed out only “look right” at the right speed. Each number is flashed at a different speed, so you just look for the least distorted numeral.
[Johan]’s code does only what it needs to get the job done. The character data are stored in arrays that are played back directly to the pins of PORTD — avoiding most of the usual Arduino-style complexity with pin definitions and other foolery.
Every good dog is deserving of a treat. [Eliasbakken]’s dog [Moby] is a certified good boy, so he designed a dispenser with a touchscreen that his dog can boop to treat himself when he isn’t barking up a ruckus.
Adding a touchscreen to a treat dispenser when a button would suffice is a little overkill, but we’re not here to judge. [Eliasbakken] is using a BeagleBone Black — a Linux-based development platform — as this dispenser’s brains, and a Manga touchscreen that is likely to see a lot of use. A wood-like material called Vachromat was laser cut for the frame and glued together, while an RC servo with a 3D-printed jointed pushing arm to dispenses the treats. The dispenser’s hopper only holds fifteen, so we expect it will need to be refilled every fifteen seconds or so.