So it’s 2023, and you really feel like we should have flying cars by now, right? Well, as long as you ignore the problem of scale presented by [Nick Rehm]’s flying RC drift car, we pretty much do.
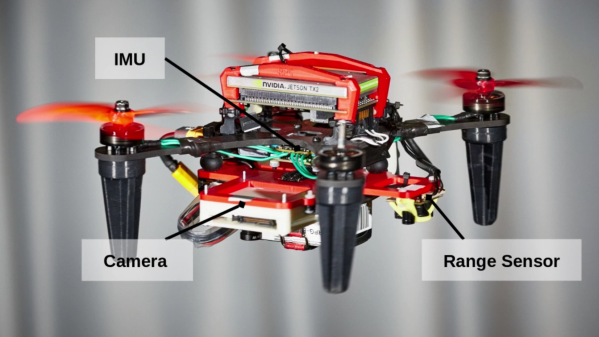
At first glance, [Nick]’s latest build looks pretty much like your typical quadcopter. But the design has subtle differences that make it more like a car without wheels. The main difference is the pusher prop at the aft, which provides forward thrust without having to pitch the entire craft. Other subtle clues include the belly-mounted lidar and nose-mounted FPV camera, although those aren’t exactly unknown on standard UAVs.
The big giveaway, though, is the RC car-style remote used to fly the drone. Rather than use the standard two-joystick remote, [Nick] rejiggered his dRehmFlight open-source flight control software to make operating the drone less like flying and more like driving. The lidar is used to relieve the operator of the burden of altitude keeping by holding the drone at about a meter or so off the deck. And the video below shows it doing a really good job of it, for the most part — with anything as complicated as the multiple control loops needed to keep this thing in the air, it’s easy for a sudden input to confuse things.
We have to admit that [Nick]’s creation looks like a lot of fun to fly, or drive — whichever way you want to look at it. Either way, we like the simplification of the flight control system and translating the driving metaphor into flying — it seems like that’ll be something we need if we’re ever to have full-size flying cars.
Continue reading “Fly Like You Drive With This Flying RC Drift Car”