If you’ve got a wireless keyboard or mouse, you’ve probably got a receiver dongle of some sort tucked away in one of your machine’s USB ports. While modern technology has allowed manufacturers to shrink them down to the point that they’re barely larger than the USB connector itself, they still stick out enough to occasionally get caught on things. Plus, let’s be honest, they’re kind of ugly.
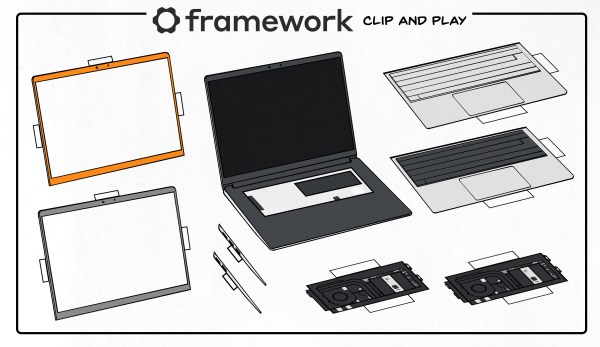
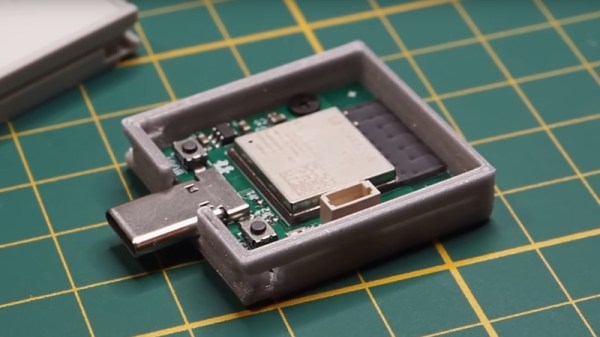
For owners of the Framework laptop, there’s now a solution: the DongleHider+ by [LeoDJ]. This clever open source hardware project is designed to bring these little receivers, such as the Logitech Unifying Dongle, into one of the Framework’s Expansion bays. The custom PCB is designed with a large notch taken out to fit the dongle’s PCB, all you need to do is solder it in with four pieces of stiff wire.
Continue reading “OSHW Framework Laptop Expansion Hides Dongles”