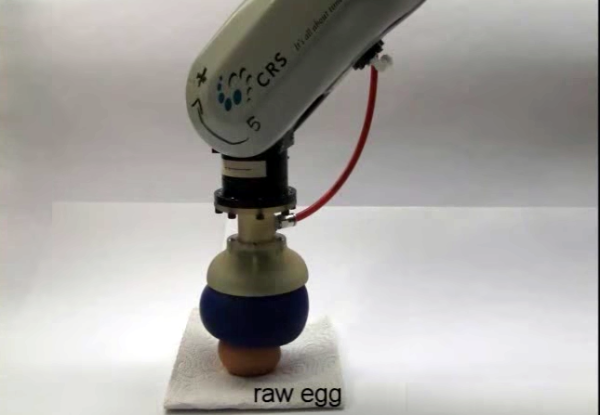
Here at Hackaday, we love it when people make home brew versions of elaborate, expensive, and technical equipment. By gathering up some coffee grounds, a balloon, some plastic tubing, and his lungs, [Carlos] has provided a good how-to on making your own coffee grounds robotic hand. Inspired by the U. Chicago, Cornell, and iRobot Collaboration we previously covered, he is one robot and a vacuum pump away from having their setup. Check out his blog for a list of components as well as a couple hints to help the build go smoothly. Be sure to check out the video after the break.
[via Make]