There are many possible answers to the question of what the lowest-powered hardware on which Linux could run might be, but it’s usually a pre-requisite for a Linux-capable platform to have a memory management unit, or MMU. That’s not the whole story though, because there are microcontroller-focused variants of the kernel which don’t require an MMU, including one for the Xtensa cores found on many Espressif chips. It’s this that [Naveen] is using to produce a computer which may not be the Linux computer with the lowest processor power, but could be the one consuming the least electrical power.
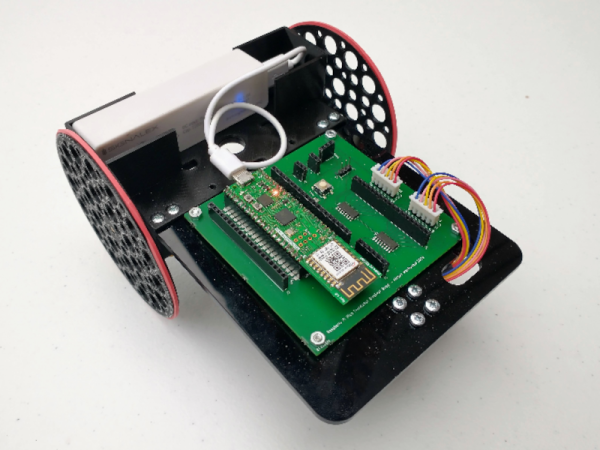
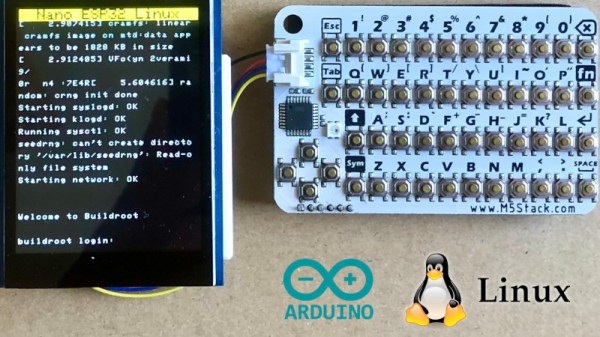
The result is definitely not a Linux powerhouse, but with its Arduino-sourced ESP32 board stacked on an UNO and I2C keyboard and display, it’s an extremely lightweight device. The question remains, though, is it more than a curiosity, and to what can it do? The chief advantage it has over its competitors such as the Raspberry Pi Zero comes in low power consumption, but can its cut-down Linux offer as much as a full-fat version? We are guessing that some commenters below will know the answer.
If you’re curious about the Xtensa version of Linux, it can be found here,