When we first developed telescopes, we started using them on the ground. Humanity was yet to master powered flight, you see, to say nothing of going beyond into space. As technology developed, we realized that putting a telescope up on a satellite might be useful, since it would get rid of all that horrible distortion from that pesky old atmosphere. We also developed radio telescopes, when we realized there were electromagnetic signals beyond visible light that were of great interest to us.
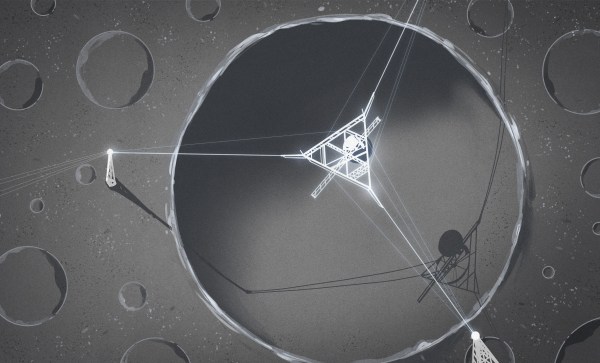
Now, NASA’s dreaming even bigger. What if it could build a big radio telescope up on the Moon?
Recently, a prototype inflatable space station module built by Sierra Space exploded violently on a test stand at NASA’s Marshall Space Flight Center in Alabama. Under normal circumstances, this would be a bad thing. But in this case, Sierra was looking forward to blowing up their handiwork. In fact, there was some disappointment when it failed to explode during a previous test run.
LIFE Module Burst Test
That’s because the team at Sierra was looking to find the ultimate bust pressure of their 8.2 meter (26.9 foot) diameter Large Integrated Flexible Environment (LIFE) module — a real-world demonstration of just how much air could be pumped into the expanding structure before it buckled. NASA recommended they shoot for just under 61 PSI, which would be four times the expected operational pressure for a crewed habitat module.
By the time the full-scale LIFE prototype ripped itself apart, it had an internal pressure of 77 PSI. The results so far seem extremely promising, but Sierra will need to repeat the test at least two more times to be sure their materials and construction techniques can withstand the rigors of spaceflight.
Sierra is a targeting no earlier than 2026 for an in-space test, but even if they nail the date (always a dubious prospect for cutting edge aerospace projects), they’ll still be about 20 years late to the party. Despite how futuristic the idea of inflatable space stations may seem, NASA first started experimenting with the concept of expandable habitat modules back in the 1990s, and there were practical examples being launched into orbit by the early 2000s.
[Eric Berger] has a thoughtful and detailed article explaining why Ingenuity, NASA’s small helicopter on Mars, was probably far more revolutionary than many realize, and has a legacy to grant the future of off-world exploration that is already being felt.
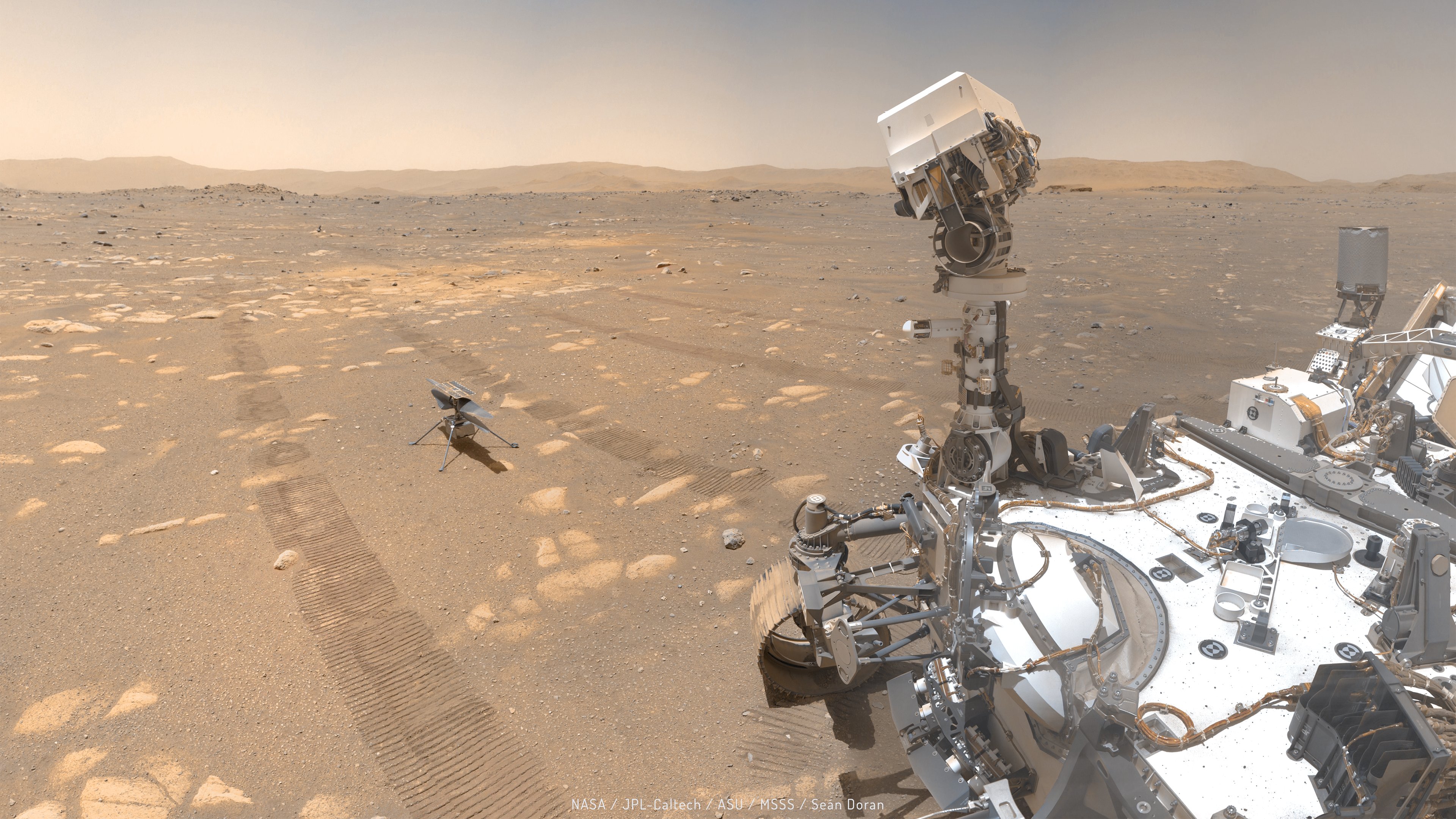
Ingenuity was recently grounded due to rotor damage, having already performed far beyond the scope of its original mission. The damage, visible by way of a shadow from one of the rotors, might not look like much at first glance, but flying in the vanishingly-thin atmosphere of Mars requires the 1.18 meter (3.9 foot) carbon fiber blades to spin at very high speeds — meaning even minor rotor damage could be devastating.
Perseverance and Ingenuity pose for a selfie on Mars.
[Eric] points out a lot that is deeply interesting and influential about Ingenuity. Not only is successful powered flight on another planet a real Wright brothers moment, but how Ingenuity came to be validates a profoundly different engineering approach for NASA.
To work in the space industry is to be constrained by mass. But even so, Ingenuity‘s creators had a mere four pounds to work with. That’s for rotors, hardware, electronics, batteries, solar panel — all of it. NASA’s lightest computer module alone weighed a pound, so engineers had no choice but to depart from the usual NASA way of doing things to get it done at all. Not everyone at NASA was on board. But Ingenuity worked, and it worked wonderfully.
Powered flight opens new doors, and not just for support roles like navigation planning. There’s real science that can be done if powered flight is on the table. For example, [Eric] points out that inaccessible terrain such as the Valles Marineris canyon on Mars is doubtlessly scientifically fascinating, but at 4,000 km long and up to 7 km deep, rover-based exploration is not an option.
It’s 2024. NASA’s Artemis program is in full swing, and we’re hoping to get back to the surface of the Moon real soon. Astronauts haven’t walked on the beloved sky rock since 1972! A human landing was scheduled for 2025, which has now been pushed back to 2026, and we’re all getting a bit antsy about it. Last time we wanted to go, it only took 8 years!
Now, somehow, it’s harder, but NASA also has its sights set higher. It no longer wants to just toddle about the Moon for a bit to wave at the TV cameras. This time, there’s talk of establishing permanent bases on the Moon, and actually doing useful work, like mining. It’s a tantalizing thought, but what does this mean for the sanctity of one of the last pieces of real estate yet to be spoilt by humans? Researchers are already arguing that we need to move to protect this precious, unique environment.
It’s already been more than fifty years since a human last stepped foot on another celestial body, and now that NASA has officially pushed back key elements of their Artemis program, we’re going to be waiting a bit longer before it happens again. What’s a few years compared to half a century?
The January 9th press conference was billed as a way for NASA Administrator Bill Nelson and other high-ranking officials within the space agency to give the public an update on Artemis. But those who’ve been following the program had already guessed it would end up being the official concession that NASA simply wasn’t ready to send astronauts out for a lunar flyby this year as initially planned. Pushing back this second phase of the Artemis program naturally means delaying the subsequent missions as well, though during the conference it was noted that the Artemis III mission was already dealing with its own technical challenges.
More than just an acknowledgement of the Artemis delays, the press conference did include details on the specific issues that were holding up the program. In addition several team members were able to share information about the systems and components they’re responsible for, including insight into the hardware that’s already complete and what still needs more development time. Finally, the public was given an update on what NASA’s plans look like after landing on the Moon during the Artemis III mission, including their plans for constructing and utilizing the Lunar Gateway station.
With the understanding that even these latest plans are subject to potential changes or delays over the coming years, let’s take a look at the revised Artemis timeline.
For those with an interest in the history of spaceflight, January 8th promised to be a pretty exciting day. Those who tuned into the early morning live stream were looking forward to seeing the first flight of the Vulcan Centaur, a completely new heavy-lift booster developed by United Launch Alliance. But as noteworthy as the inaugural mission of a rocket might be under normal circumstances, this one was particularly special as it was carrying Peregrine — set to be the first American spacecraft to set down on the lunar surface since the end of the Apollo program in 1972.
Experience has taught us that spaceflight is hard, and first attempts at it doubly so. The likelihood of both vehicles performing as expected and accomplishing all of their mission goals was fairly remote to begin with, but you’ve got to start somewhere. Even in the event of a complete failure, valuable data is collected and real-world experience is gained.
Now, more than 24 hours later, we’re starting to get that data back and finding out what did and didn’t work. There’s been some disappointment for sure, but when everything is said and done, the needle definitely moved in the right direction.
With the notable exception of the now retired Space Shuttle orbiters, essentially every object humanity ever shot into space has been single-use only. But since December of 2015, SpaceX has been landing and refurbishing their Falcon 9 boosters, with the end goal of operating their rockets more like cargo aircraft. Today, while it might go unnoticed to those who aren’t closely following the space industry, the bulk of the company’s launches are performed with boosters that have already completed multiple flights.
This reuse campaign has been so successful these last few years that the recent announcement the company had lost B1058 (Nitter) came as quite a surprise. The 41 meter (134 foot) tall booster had just completed its 19th flight on December 23rd, and had made what appeared to be a perfect landing on the drone ship Just Read the Instructions. But sometime after the live stream ended, SpaceX says high winds and powerful waves caused the booster to topple over.