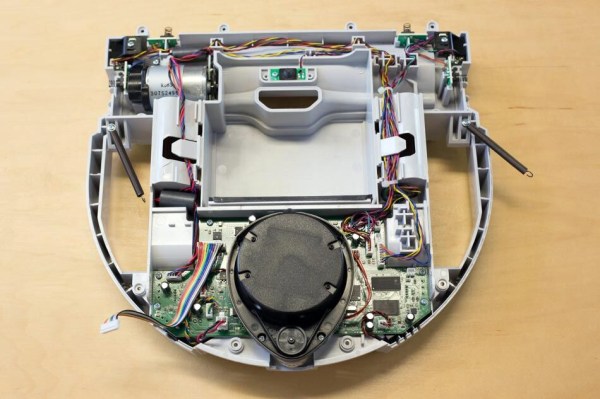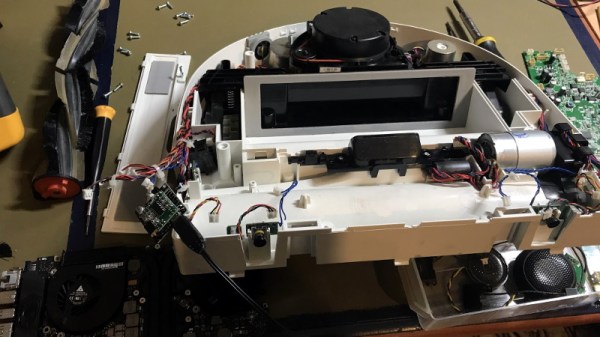
While repairing his Neato Botvac D85, [elad] noticed the little fellow was packing a real speaker and not just a piezo buzzer. Thinking this was a bit overkill just for the occasional beep and bloop, he decided to round things out with a Bluetooth receiver and a second speaker so the bot can spin some stereo tunes while it gets down and dirty.
It wasn’t a very expensive modification. Between the VHM-314 Bluetooth receiver, the 3 watt PAM8403 amplifier, and a matching speaker, [elad] says he was only a few bucks out of pocket. Truly a small price to pay for a robotic vacuum that plays its own theme music as it travels around the house. A small demonstration of the Neato’s new musical talents can be heard in the video after the break.
Perhaps unsurprisingly, the audio hardware puts enough of a drain on the robot’s batteries at max volume that there’s a noticeable reduction in runtime. He’s not too worried about it right now, but [elad] mentions that if it ends up keeping the vacuum from being able to complete it’s whole cleaning cycle, that he might look into adding a dedicated power source to keep the music going.
Despite some early encouragement from iRobot, we haven’t seen quite as much robot vacuum hacking as you might think. It’s always interesting to get a glimpse inside of these automated housekeepers, especially when it’s a custom built machine.
Continue reading “Modded Robot Vacuum Can Whistle While It Works”