For all its ability to advance modern society in basically every appreciable way, science still has yet to explain some seemingly basic concepts. One thing that still has a few holes in our understanding is the method by which a bicycle works. Surely, we know enough to build functional bicycles, but like gravity’s inclusion into the standard model we have yet to figure out a set of equations that govern all bicycles in the universe. To push our understanding of bicycles further, however, some are performing experiments like this self-balancing omniwheel bicycle robot.
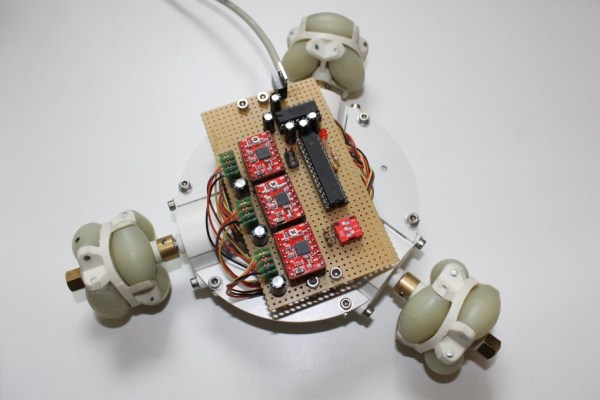
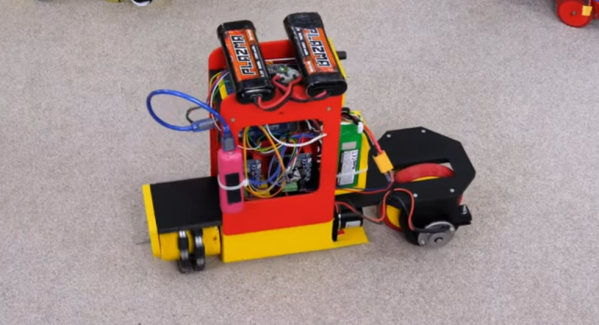
Functional steering is important to get the bicycle going in the right direction, but it’s also critical for keeping the bike upright. This is where [James Bruton] is putting the omniwheel to the test. By placing it at the front of the bike, oriented perpendicularly to the direction of travel, he can both steer the bicycle robot and keep it balanced. This does take the computational efforts of an Arduino Mega paired with an inertial measurement unit but at the end [James] has a functional bicycle robot that he can use to experiment with the effects of different steering methods on bicycles.
While he doesn’t have a working omniwheel bicycle for a human yet, we at least hope that the build is an important step on the way to [James] or anyone else building a real bike with an omniwheel at the front. Hopefully this becomes a reality soon, but in the meantime we’ll have to be content with bicycles with normal wheels that can balance and drive themselves.

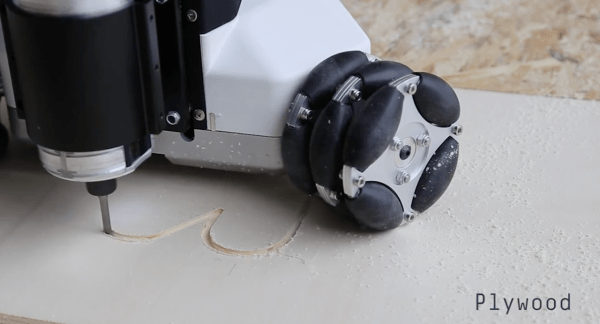
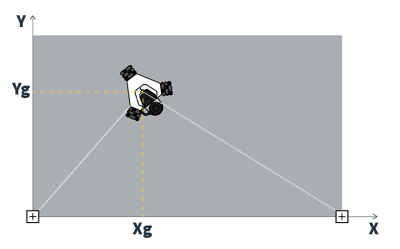 What really caught our eye is the Goliath’s unique positioning system. While most CNC machines have the luxury of end-stops or servomotors capable of precise positional control, the Goliath has two “base sensors” that are tethered to the top of the machine and mounted to the edge of the workpiece. Each sensor connects to the host computer via USB and uses vaguely termed “Radio Frequency technology” that provides a 100Hz update for the machine’s coordinate system. This setup is sure to beat out dead-reckoning for positional awareness, but details are scant on how it precisely operates. We’d love to know more if you’ve used a similar setup for local positioning as this is still a daunting task for indoor robots.
What really caught our eye is the Goliath’s unique positioning system. While most CNC machines have the luxury of end-stops or servomotors capable of precise positional control, the Goliath has two “base sensors” that are tethered to the top of the machine and mounted to the edge of the workpiece. Each sensor connects to the host computer via USB and uses vaguely termed “Radio Frequency technology” that provides a 100Hz update for the machine’s coordinate system. This setup is sure to beat out dead-reckoning for positional awareness, but details are scant on how it precisely operates. We’d love to know more if you’ve used a similar setup for local positioning as this is still a daunting task for indoor robots.