Picking up new skills in the electronics field is often best served by the classic mantra – “learn by doing”. [Juan] and [Leo] did just that, deciding to build a handheld game console for a University project, and delivering the PGC-32.
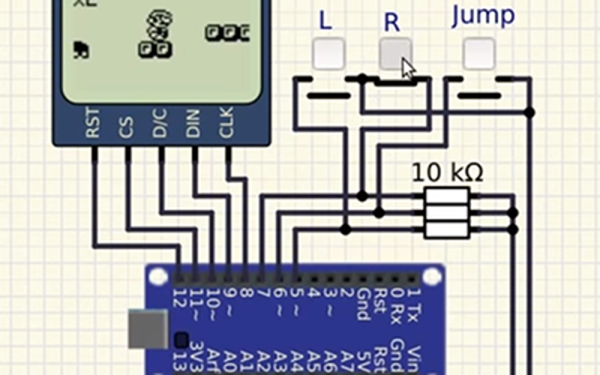
Built as a final project for the Digital Systems Design course at Cornell University, the PGC-32 takes on a daunting chunk of functionality, and pulls it off in time to get the grades. The team coded a basic block-based game for the hardware, and control is switchable between the analog stick and a built-in accelerometer. Gameplay is displayed on a 320 x 280 color TFT display. Learning to code a basic game is useful, as it teaches student engineers to consider important concepts like timing, race conditions, interrupts, and display routines.
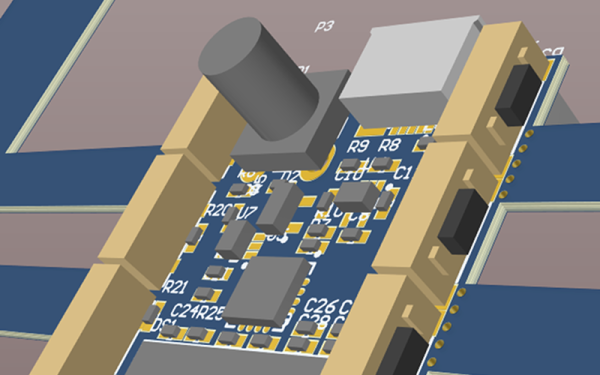
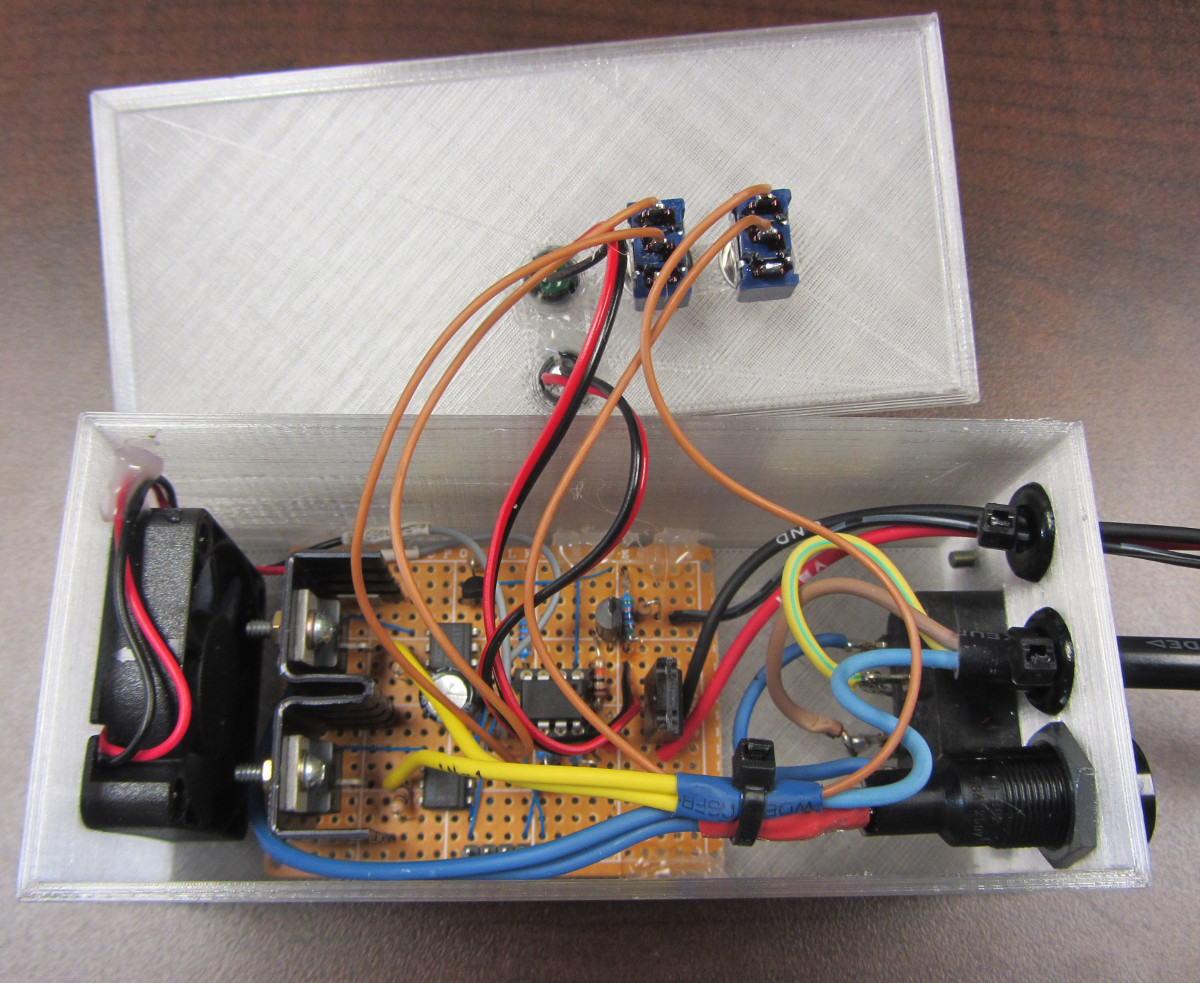
As a university project, it is well documented and the team step through each detail in their code with explanations as to how and why things are done. The internals are particularly neat, too, with a tidy PCB layout and 3D printed case holding everything together.
We’ve seen plenty of work from Cornell’s courses before, too – like this sleep quality monitor. Video after the break.
Continue reading “PIC-Powered Game Console Is Blocky Goodness”