Radio control toys can be great fun to play with. However, at the bottom end of the market, sometimes you find you’ve bought something that just doesn’t work quite right. [saulemmetquinn] found that with a cheap RC helicopter, and set about re-engineering the design in Tinkercad.
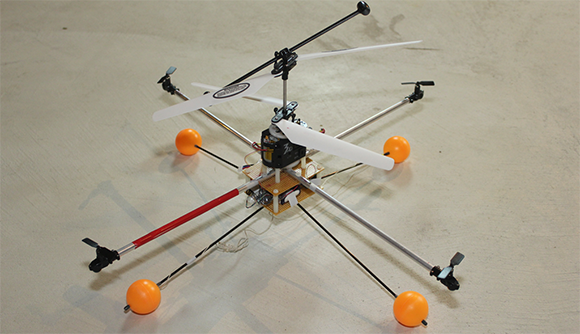
The entire frame of the original helicopter was discarded, replaced with one made out of CAD-designed and 3D printed components. The end result is far lighter and less cumbersome than the original design, while also managing to look a lot more like an actual helicopter. It also served to correct some of the problems which [saulemmetquinn] stated made the original toy difficult to fly.
Assembling your own tiny helicopter motors and mechanisms would be quite difficult, and time consuming. [saulemmetquinn] was instead able to leverage the good parts of the original design, and build something better from that. It’s very much the essence of hacking, right there.
We’ve seen other toy helicopters hacked too, like the famous Syma S107G. If you’ve got your own tiny flying hacks, be sure to drop us a line.