Sisyphus is an art installation by [Kachi Chan] featuring two scales of robots engaged in endless cyclic interaction. Smaller robots build brick arches while a giant robot pushes them down. As [Kachi Chan] says “this robotic system propels a narrative of construction and deconstruction.” The project was awarded honorary mention at the Ars Electronica’s Prix Ars 2022 in the Digital Communities category. Watch the video after the break to see the final concept.
[Kachi Chan] developed the installation in pre-visualizations and through a series of prototypes shown in a moody process film, the second video after the break. While the film is quite short on details, you’ll see iterations of the robot arm and computer vision system. According to this article on the project [Kachi Chan] used Cinema 4D to simulate the motion, ROS for control, PincherX150 robotic arms modified with Dynamixel XM 430 & XL430 servo motors, and custom 3D prints.
[Maurizio] built a robot arm, which is always a great accomplishment. But his project includes a very cool touch interface for an Android device that sets it apart from many other similar projects.You can see a very fast summary of the construction in the video below.
The design uses Fusion 360 and there are good explanations of each step in the process. The gripper is adapted from an existing design. Various 3D printed parts make up the wrist, shoulder, elbow, and rotating base.
You’ve built a robot crammed full of servos and now you settle down for the fun part, programming your new dancing animatronic bear! The pain in your life is just beginning. Imagine that you decide the dancing bear should raise it’s arm. If you simply set a servo position, the motor will slew into place as fast as it can. What you need is an animation, and preferably with smooth acceleration.
You could work through all the math yourself. After half an hour of fiddling with the numbers, the bear is gracefully raising it’s arm like a one armed zombie. And then you realize that the bear has 34 more servos.
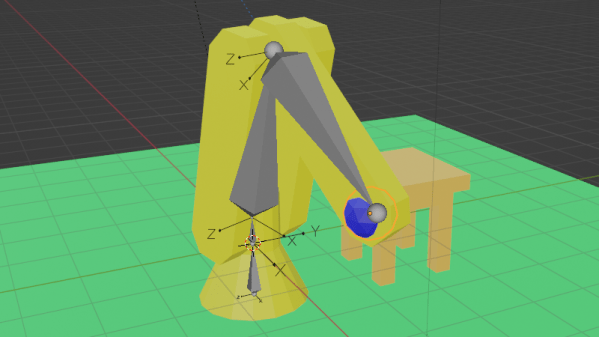
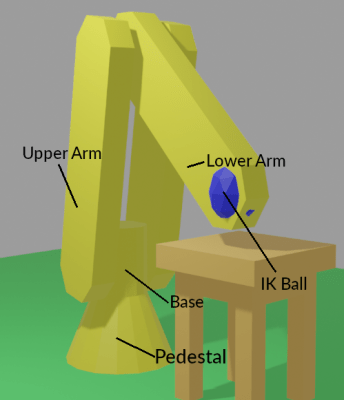
Fortunately for everybody who’s done the above, there’s Blender. It’s all about creating smooth motion for animations and computer graphics. Making robot motion with Blender is, if not easy, at least tolerable. We made a sample project, a 3-axis robot arm to illustrate. It has a non-moving pedestal, rotating base, upper arm, and lower arm. We’ll be animating it first in Blender and then translating the file over to something we can use to drive the servos with a little script.
Now, Blender is notorious for a difficult user interface. The good news is that, with revision 2.9, it moved to a much more normal interface. It still definitely is a large program, with 23 different editors and literally thousands of controls, but we’ll only be using a small subset to make our robot move. We won’t teach you Blender here, because there are thousands of great Blender tutorials online. You want to focus on animation, and the Humane Rigging series is particularly recommended.
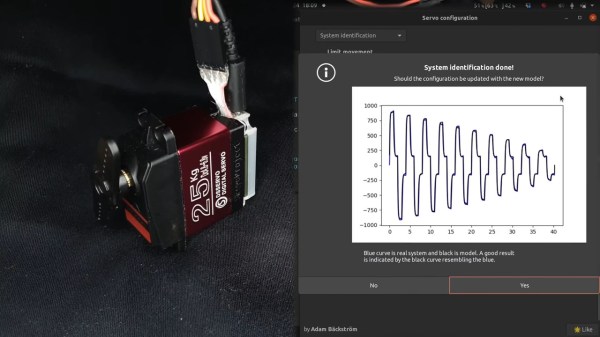
Today, we shall talk about how [Adam Bäckström] took a DS3225 servo and rebuilt it to improve its accuracy, then built a high-precision robot arm with those modified servos to show just how much of an improvement he’s got – up to 36 times better positional accuracy. If this brings a déjà vu feeling, that’s because we’ve covered his servo modifications before, but now, there’s more. In a year’s time since the last video came out, [Adam] has taken it to the next level, showing us how the modification is made, and how we ourselves can do it, in a newly released video embedded below.
After ordering replacement controller PCBs designed by [Adam] (assembled by your PCBA service of choice), you disassemble the servo, carefully setting the gearbox aside for now. Gutting the stock control board is the obvious next step, but from there, you don’t just drop the new PCB in – there’s more to getting a perfect servo than this, you have to add extra sensing, too. First, you have to print a spacer and a cover for the control board, as well as a new base for the motor. You also have to print (or perhaps, laser-cut) two flat encoder disks, one black and one white, the white one being eccentric. It only escalates from here!
Often used to make rugs, tufting is a process wherein a hollow needle is used to cram thread or yarn into fabric in some kind of pattern. This can be done by hand, with a gun, or with big machines. Some machines are set up to punch the same pattern quickly over and over again, and these are difficult to retool for a new pattern. Others are made to poke arbitrary patterns and change easily, but these machines move more slowly.
This robotic tufting system by [Owen Trueblood] is of the slow and arbitrary type. It will consist of a modified tufting gun strapped to a robot arm for CNC textile art. Tufting guns are manufactured with simple controls — a power switch, a knob to set the speed, and a trigger button to do the tufting. Once it’s affixed to the robot arm, [Owen] wants to remote control the thing.
The gun’s motor driver is nothing fancy, just a 555 using PWM to control a half H-bridge based on input from the speed control potentiometer. [Owen] replaced the motor controller with an Arduino and added an I/O port. The latter is a 3.5 mm stereo audio jack wired to GND and two of the Arduino’s pins. One is a digital input to power the gun, and the other is used as an analog speed controller based on input voltage. [Owen] is just getting started, and we’re excited to keep tabs on this project as the gun goes robotic.
[Zhihui Jun] is a name you’re going to want to remember because this Chinese maker has created quite probably one of the most complete open-source robot arms (video in Chinese with subtitles, embedded below) we’ve ever seen. This project has to be seen to be believed. Every aspect of the design from concept, mechanical CAD, electronics design and software covering embedded, 3D GUI, and so on, is the work of one maker, in just their spare time! Sound like we’re talking it up too much? Just watch the video and try to keep up!
After an initial review of toy robots versus more industrial units, it was quickly decided that servos weren’t going to cut it – too little torque and lacking in precision. BLDC motors offer great precision and torque when paired with a good controller, but they are tricky to make small enough, so an off-the-shelf compact harmonic drive was selected and paired with a stepper motor to get the required performance. This was multiplied by six and dropped into some slick CNC machined aluminum parts to complete the mechanics. A custom closed-loop stepper controller mounts directly to the rear of each motor. That’s really nice too.
Stepper controller mounts on the motor rear – smart!
Control electronics are based around the STM32 using an ESP32 for Wi-Fi connectivity, but the pace of the video is so fast it’s hard to keep up with how much of the design operates. There is a brief mention that the controller runs the LiteOS kernel for Harmony OS, but no details we can find. The project GitHub has many of the gory details to pore over perhaps a bit light in places but the promise is made to expand that. For remote control, there’s a BLE-connected teaching device (called ‘Peak’) with a touch screen, again details pending. Oh, did we mention there’s a force-feedback (a PS5 Adaptive Trigger had to die for the cause) remote control unit that uses binocular cameras to track motion, with an AHRS setup giving orientation and that all this is powered by a Huawei Atlas edge AI processing system? This was greatly glossed over in the video like it was just some side-note not worth talking about. We hope details of that get made public soon!
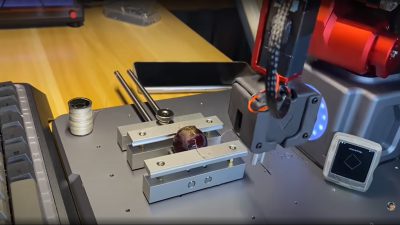
Threading a needle through a grape by remote control
The dedicated GUI, written in what looks like Unity, allows robot programming and motion planning, but since those harmonic drives are back-drivable, the robot can be moved by hand and record movements for replaying later. Some work with AR has been started, but that looks like early in the process, the features just keep on coming!
Quite frankly there is so much happening that it’s hard to summarise here and do the project any sort of justice, so to that end we suggest popping over to YT and taking a look for yourselves.
My Singing Monsters is one of those mobile titles that has users play simple games to earn coins and gems in the usual way. [Anykey] found that his son was a fan of the game, but that sometimes it felt a little rigged. Thus, rather than waste time playing themselves, he set up a robot to do the job for them. (Super-boring video, embedded below.)
The player must complete a basic but time-consuming memory game. Upon winning, the player gets to choose a prize from 17 mystery cards. The top prize of 1,000 diamonds always seemed to be hidden under another card, leading to the aforementioned frustration.
In order to test if the game was rigged, [Anykey] set up a uArm Swift Pro to play the game, with the robot arm moving a small stylus over the iPad playing the game. The iPad’s video was piped to a PC via HDMI out, going into a Camlink capture card. A Python script using OpenCV was then created to play the game automatically, and log the results of prizes gained along the way. All the code is up on GitHub.
After over 100 attempts, the robot never managed to pick the right card to score 1,000 diamonds. Given that there are only 17 cards to choose from, one would expect the 1,000 diamond prize to come up several times in that many selections.
It seems then that the prize selection for completing the memory game may not actually be down to picking the right card. Instead, the prize given is selected by some other calculation entirely.