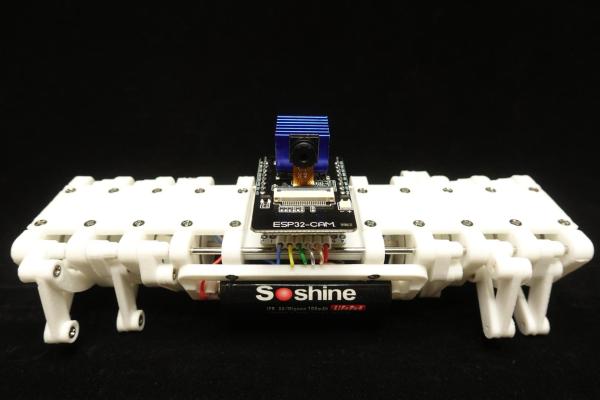
Wheels might be the simplest method of locomotion for robots, but walkers are infinitely more satisfying to watch. This is certainly the case for [Chen Liang’s] tiny Strider walker controlled by a ESP32 camera board.
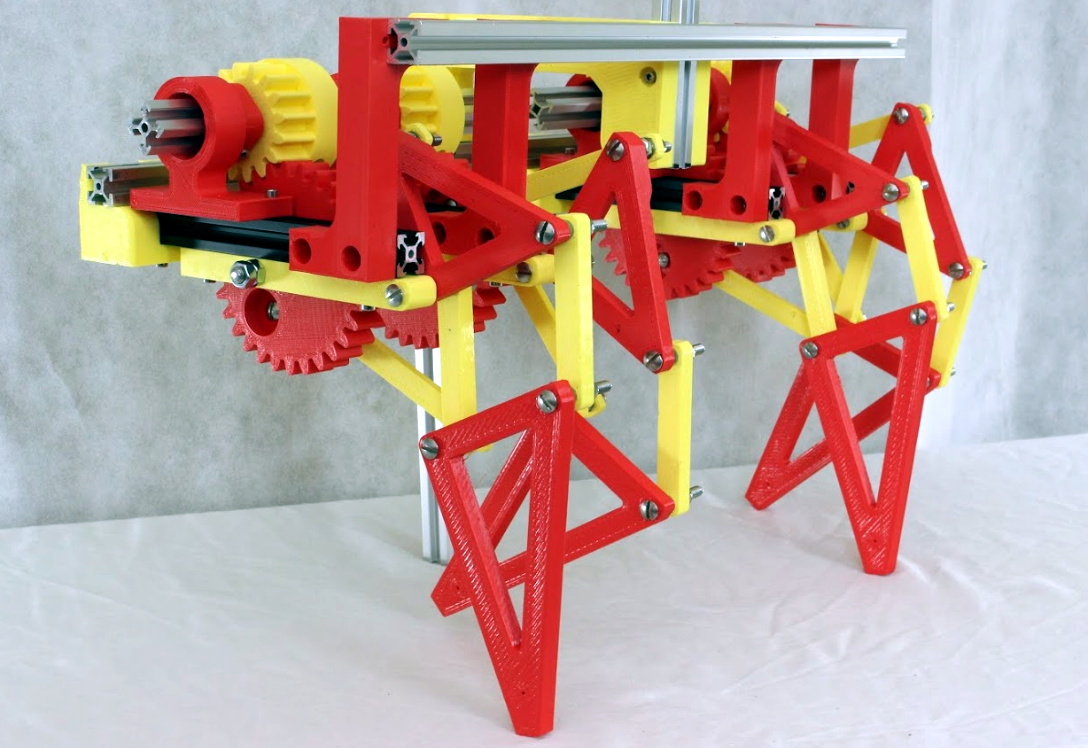
The Strider mechanism might look similar to Strandbeest walkers, but it lifts its feet higher, allowing it to traverse rougher terrain. [Chen]’s little 3D printed version is driven by a pair of geared N20 motors, with three legs on each side. The ESP32 camera board allows for control and an FPV video feed using WiFi, with power coming from a 14500 LiFePO4 battery. The width required by the motors, leg mechanisms, and bearings means the robot is quite wide, to the point that it could get stuck on something that’s outside the camera’s field of view. [Chen] is working to make it narrower by using continuous rotation servos and a wire drive shaft.
We’ve seen no shortage or riffs on the many-legged walkers, like the TrotBot and Strider mechanism developed by [Wade] and [Ben Vagle], and their website is an excellent resource for prospective builders.