The rise of smartphone and smartwatch fitness tracking has been an absolute boon for anyone interested in tracking their runs. However, it all falls short when you need a custom feature and start getting into serious long distance running, as most smartphone batteries simply won’t last. While there are devices out there for the ultra-running enthusiast, [Ivor Hewitt] decided he wasn’t willing to pay a monthly subscription for the pricy trackers or deal with the hassle of the generic cheap versions, and decided to roll his own.
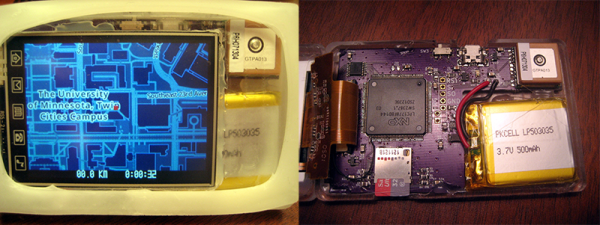
The key pieces of this project are the A9G GPS module and the RDA8955 GRS/GPRS module. They’re both incredibly small and power efficient, perfect for a project that needs to be worn on your person with a long battery life. As an added bonus, the RDA8955 also includes a SoC that’s user-programmable. After battling the lackluster documentation and tooling, [Ivor] managed to get some software running on his new system. A power bug on the A9G GPS module was potentially show stopping, but thanks to some help by folks in the community, it was diagnosed and solved.
Further additions included adding a proper charging circuit (TP4056) and a beefy 2600 mAh battery scavenged from a Sony smartphone, giving the compact system around 38 hours of active battery life. An OLED screen was added to show upcoming aid stations and overall system status, driven by a custom display library. A snazzy translucent case makes the whole device slim and easy to carry. Now at the end of a long race or training session, [Ivor] has a wealth of tracked points that has already been uploaded to his own tracking website and a fully charged phone.
Next time you’re looking for a small compact GPS tracker or cellular logger take a look at this project’s code on GitHub or the A9G and RDA8955 modules.
Thanks [Ivor] for sending this one in!

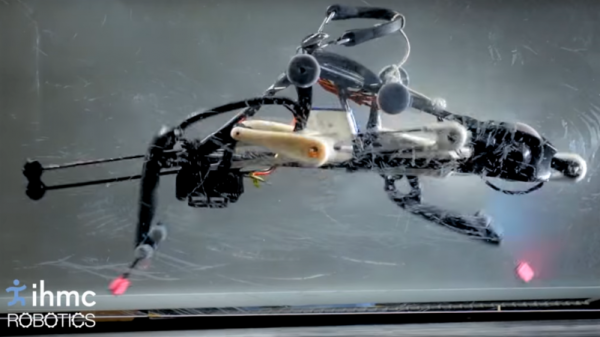
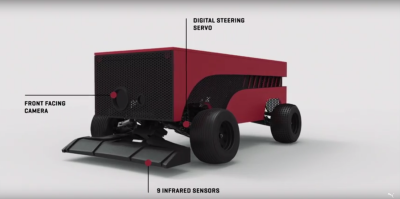
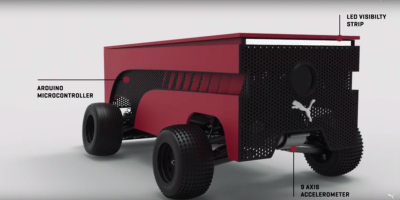
 A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.
A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.