In the discussions about how dangerous self-driving cars are – or aren’t – one thing is sorely missing, and that is an interactive game in which you do your best to not be recognized as a pedestrian and subsequently get run over. Even if this is a somewhat questionable take, there’s something to be said for the interactive display over at the Asian Art Museum in San Francisco which has you try to escape the tyranny of machine-vision and get recognized as a crab, traffic cone, or something else that’s not pedestrian-shaped.
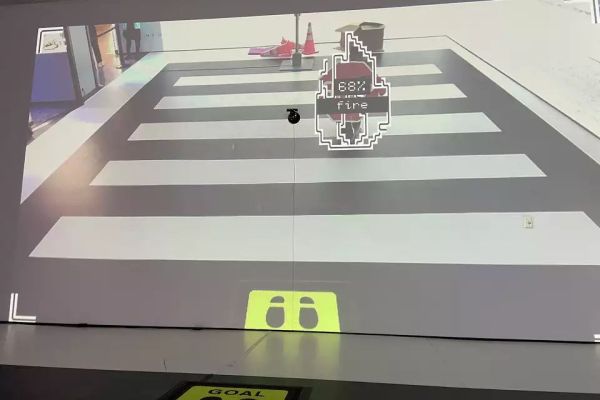
Daniel Coppen, one of the artists behind “How (not) to get hit by a self-driving car,” sets up a cone at the exhibit at the Asian Art Museum in San Francisco on March 22, 2024. (Credit: Stephen Council, SFGate)
The display ran from March 21st to March 23rd, with [Stephen Council] of SFGate having a swing at the challenge. As can be seen in the above image, he managed to get labelled as ‘fire’ during one attempt while hiding behind a stop sign as he walked the crossing. Other methods include crawling and (ab)using a traffic cone.
Created by [Tomo Kihara] and [Daniel Coppen], it’s intended to be a ‘playful, engaging game installation’. Both creators make it clear that self-driving vehicles which use LIDAR and other advanced detection methods are much harder to fool, but given how many Teslas are on the road using camera-based systems, it’s still worth demonstrating the shortcomings of the technology.
Self-driving cars are being heralded as the wave of the future, but there have been many hiccups along the way. The newest is activists showing how autonomous vehicles are easy to hack with a simple traffic cone.
As we’ve discussed before, self-driving cars aren’t actually that great at driving, and there are a number of conditions that can cause them to fail safe and stop in the middle of the road. Activist group Safe Street Rebel is exploiting this vulnerability by “coning” Waymo and Cruise vehicles in San Francisco. By placing a traffic cone on the vehicle’s hood in the way of the sensors and cameras used to navigate the streets, the vehicles are rendered inoperable. Continue reading “Coning Cars For Fun And Non-Profit”→
Despite what some people might tell you, self-driving cars aren’t really on the market yet. Instead, there’s a small handful of startups and big tech companies that are rapidly developing prototypes of this technology. These vehicles are furiously testing in various cities around the world.
In fact, depending on where you live, you might have noticed them out and about. Not least because many of them keep causing traffic jams, much to the frustration of their fellow road users. Let’s dive in and look at what’s going wrong.
Perhaps the best-known ridesharing service, Uber has grown rapidly over the last decade. Since its founding in 2009, it has expanded into markets around the globe, and entered the world of food delivery and even helicopter transport.
One of the main headline research areas for the company was the development of autonomous cars, which would revolutionize the company’s business model by eliminating the need to pay human drivers. However, as of December, the company has announced that it it spinning off its driverless car division in a deal reportedly worth $4 billion, though that’s all on paper — Uber is trading its autonomous driving division, and a promise to invest a further $400 million, in return for a 26% share in the self-driving tech company Aurora Innovation.
Playing A Long Game
Uber’s self-driving efforts have been undertaken in close partnership with Volvo in recent years.
Uber’s driverless car research was handled by the internal Advanced Technologies Group, made up of 1,200 employees dedicated to working on the new technology. The push to eliminate human drivers from the ride-sharing business model was a major consideration for investors of Uber’s Initial Public Offering on the NYSE in 2019. The company is yet to post a profit, and reducing the amount of fares going to human drivers would make it much easier for the company to achieve that crucial goal.
However, Uber’s efforts have not been without incident. Tragically, in 2018, a development vehicle running in autonomous mode hit and killed a pedestrian in Tempe, Arizona. This marked the first pedestrian fatality caused by an autonomous car, and led to the suspension of on-road testing by the company. The incident revealed shortcomings in the company’s technology and processes, and was a black mark on the company moving forward.
The Advanced Technology Group (ATG) has been purchased by a Mountain View startup by the name of Aurora Innovation, Inc. The company counts several self-driving luminaries amongst its cofounders. Chris Urmson, now CEO, was a technical leader during his time at Google’s self-driving research group. Drew Bagnell worked on autonomous driving at Uber, and Sterling Anderson came to the startup from Tesla’s Autopilot program. The company was founded in 2017, and counts Hyundai and Amazon among its venture capital investors.
Aurora could also have links with Toyota, which also invested in ATG under Uber’s ownership in 2019. Unlike Uber, which solely focused on building viable robotaxis for use in limited geographical locations, the Aurora Driver, the core of the company’s technology, aims to be adaptable to everything from “passenger sedans to class-8 trucks”.
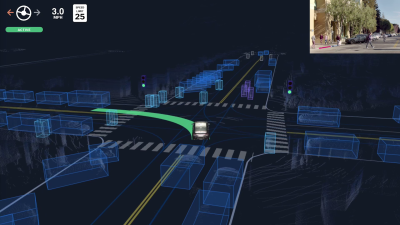
Aurora has been developing self-driving technology to handle real-world situations since its founding in 2017. Being able to master the challenges of a crowded city will be key to succeeding in the marketplace.
Getting rid of ATG certainly spells the end of Uber’s in-house autonomous driving effort, but it doesn’t mean they’re getting out of the game. Holding a stake in Aurora, Uber still stands to profit from early investment, and will retain access to the technology as it develops. At the same time, trading ATG off to an outside firm puts daylight between the rideshare company and any negative press from future testing incidents.
When you put a human driver behind the wheel, they will use primarily their eyes to navigate. Both to stay on the road and to use any navigation aids, such as maps and digital navigation assistants. For self-driving cars, tackling the latter is relatively easy, as the system would use the same information in a similar way: when to to change lanes, and when to take a left or right. The former task is a lot harder, with situational awareness even a challenge for human drivers.
In order to maintain this awareness, self-driving and driver-assistance systems use a combination of cameras, LIDAR, and other sensors. These can track stationary and moving objects and keep track of the lines and edges of the road. This allows the car to precisely follow the road and, at least in theory, not run into obstacles or other vehicles. But if the weather gets bad enough, such as when the road is covered with snow, these systems can have trouble coping.
Looking for ways to improve the performance of autonomous driving systems in poor visibility, engineers are currently experimenting with ground-penetrating radar. While it’s likely to be awhile before we start to see this hardware on production vehicles, the concept already shows promise. It turns out that if you can’t see whats on the road ahead of you, looking underneath it might be the next best thing. Continue reading “Navigating Self-Driving Cars By Looking At What’s Underneath The Road”→
In a recent study by a team of researchers at MIT, self driving cars are being programmed to identify the social personalities of other drivers in an effort to predict their future actions and drive safer on roads.
It’s already been made evident that autonomous vehicles lack social awareness. Drivers around a car are regarded as obstacles rather than human beings, which can hinder the automata’s ability to identify motivations and intentions, potential signifiers to future actions. Because of this, self-driving cars often cause bottlenecks at four-way stops and other intersections, perhaps explaining why the majority of traffic accidents involve them getting rear-ended by impatient drivers.
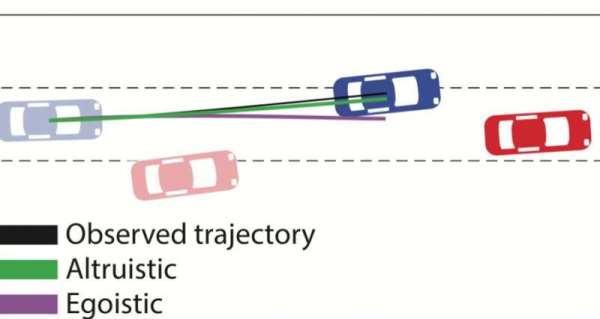
The research taps into social value orientation, a concept from social psychology that classifies a person from selfish (“egoistic”) to altruistic and cooperative (“prosocial”). The system uses this classification to create real-time driving trajectories for other cars based on a small snippet of their motion. For instance, cars that merge more often are deemed as more competitive than other cars.
When testing the algorithms on tasks involving merging lanes and making unprotected left turns, the behavioral predictions were shown to improve by a factor of 25%. In a left-turn simulation, the automata was able to wait until the approaching car had a more prosocial driver.
Even outside of self-driving cars, the research could help human drivers predict the actions of other drivers around them.
At the turn of the 21st century, it became pretty clear that even our cars wouldn’t escape the Digital Revolution. Years before anyone even uttered the term “smartphone”, it seemed obvious that automobiles would not only become increasingly computer-laden, but they’d need a way to communicate with each other and the world around them. After all, the potential gains would be enormous. Imagine if all the cars on the road could tell what their peers were doing?
Forget about rear-end collisions; a car slamming on the brakes would broadcast its intention to stop and trigger a response in the vehicle behind it before the human occupants even realized what was happening. On the highway, vehicles could synchronize their cruise control systems, creating “flocks” of cars that moved in unison and maintained a safe distance from each other. You’d never need to stop to pay a toll, as your vehicle’s computer would communicate with the toll booth and deduct the money directly from your bank account. All of this, and more, would one day be possible. But only if a special low-latency vehicle to vehicle communication protocol could be developed, and only if it was mandated that all new cars integrate the technology.
Except of course, that never happened. While modern cars are brimming with sensors and computing power just as predicted, they operate in isolation from the other vehicles on the road. Despite this, a well-equipped car rolling off the lot today is capable of all the tricks promised to us by car magazines circa 1998, and some that even the most breathless of publications would have considered too fantastic to publish. Faced with the challenge of building increasingly “smart” vehicles, manufacturers developed their own individual approaches that don’t rely on an omnipresent vehicle to vehicle communication network. The automotive industry has embraced technology like radar, LiDAR, and computer vision, things which back in the 1990s would have been tantamount to saying cars in the future would avoid traffic jams by simply flying over them.
In light of all these advancements, you might be surprised to find that the seemingly antiquated concept of vehicle to vehicle communication originally proposed decades ago hasn’t gone the way of the cassette tape. There’s still a push to implement Dedicated Short-Range Communications (DSRC), a WiFi-derived protocol designed specifically for automotive applications which at this point has been a work in progress for over 20 years. Supporters believe DSRC still holds promise for reducing accidents, but opponents believe it’s a technology which has been superseded by more capable systems. To complicate matters, a valuable section of the radio spectrum reserved for DSRC by the Federal Communications Commission all the way back in 1999 still remains all but unused. So what exactly does DSRC offer, and do we really still need it as we approach the era of “self-driving” cars?