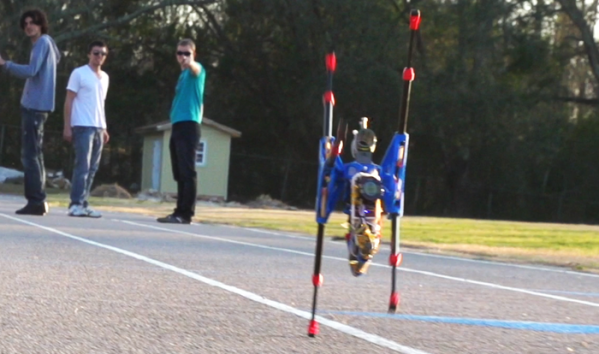
Looking at this legged robot gives us the same feeling we had the first time we saw a two-wheeled balancer. At first glance it just shouldn’t work, but after a little thought it makes a lot of sense. The six-legged bot called OutRunner uses two sets of three legs to propel itself. The footfalls are staggered to mimic how a biped runs, but mechanically it’s just spinning wheels to which the legs attach. If you have a smart enough algorithm it will not only remain upright but be steerable too.
This is a Kickstarter offering to let you can get your hands on an unassembled kit for $200. That version comes with a universal camera mount but no camera. This may not sound like a problem, but look closer and you may notice what we have: The thing is remote-controlled and can run up to 20 MPH, but there’s not footage of it running slowly. We’d wager the need to keep itself balanced equates to the need to run rather than walk. Since it’s going to get away from you very quickly you probably need a camera and a wearable display (or a chase car like in the video) to make the most out of the OutRunner. But hey, who’s complaining about that? Sounds like a ton of fun to us!
Why is it that this thing looks delightful but all of the Boston Dynamics running bots scare the crap out of us?
Continue reading “Robot Runs On 6 Legs But Never More Than 2 At A Time”










