Engineering student [Varun Suresh] designed his SafeRanger rover to inspect oil and gas power plants for abnormal temperatures as well as gas leaks. The rover explores critical areas of the factory, and data is sent to a control center for analysis.
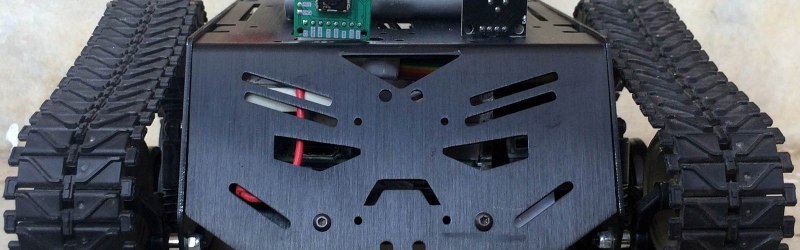
[Varun] built his robot around a Devastator chassis kit from DFRobot, and equipped it with a FLIR Lepton thermal camera and an MQ2 gas sensor, both monitored by a Raspberry Pi. The twin brushless DC motors are controlled by an L293D motor driver IC in conjunction with an Arduino Nano; steering is accomplished with an HC-05 Bluetooth module and a mobile app.
We could see technology like this being implemented in a labyrinthine facility where a human inspector might have a difficult time reaching every nook and cranny. Or just let it wander ar0und, looking for trouble?


















That sounds very interesting.
very challenging, given the inherent need for total safety and reliability in those environments. There are probably good reasons why existing similar products are so expensive to buy, and also so big. You probably want something like military grade reliability. This is why you pay top dollar for well built kit. Okay, the motors being used are brushless, but how about the battery and power system? What happens if this thing falls of a ledge and drops 50 feet? Any chance of a spark? If you are going to spend millions (or even billions?) on building a power station, would you really be so worried about cost?
The ones we used at work do look like tanks and do have a cable connected.
They are very basic machines. Very very little as electronics in them and we used one that was controlled by air, in a pipe that had the potential of igniting. Verry cool the camera was in a explosion proof Light housing with a 1″ plexiglass lens.
And there is a plan in place if something does go wrong. Most of the time it is pulling on the cable to a max. pressure not to damage the equipment and if they do have to go in it will cost a heck of a lot of money. But the planing that is in place makes it very unlikely it will get stuck.
But I did forget to mention that there is still a need for these little robots. There are a million uses for them.
Any type of development is great. On all levels.
Keep up the good work.
One Day I will have my fleet of robots rooming the house and outside.
Ex-ter-min-ate! Ex-ter-min-ate!
Hi reliability devices need to start somewhere – develop proof of concept, test, iterate and harden.
If power companies are anything Iike the medical industry, if you can cut a corner do it and make sure you can blame someone else……
Last line “….wander ar0und”
Planting coded messages or clumsy fingers?
I can see the need in very remote places or in recovery operations but during normal operations, wouldn’t it be better to just have permanent sensors at the key places? Aren’t there already sensors in these key places?
Sensors degrade over time and need calibration. It makes much more sense to have a sensor network but that will require knowledgeable maintenance and will cost execs their cream.
Got a systems failure? Sensors data missing or weird (technical term)? Send in a rover/drone to check that the humans won’t die in that pit before unleashing the techs.
Pit work is dangerous. It can accumulate all sorts of nasties – methane included. I’d like to send something else in before I risk a human life.
Sure, but putting sensors on a mobile platform doesn’t solve degradation or calibration. Plenty of sensors can last a year or more in continuous use. For simple methods you frequently only need to calibrate at power on. Even if you have to calibrate a sensor twice a year, that’s not too bad and can probably be timed to occur during other maintenance.
Confined spaces are dangerous but hand held PIDs and O2 meters make it pretty easy to determine the danger. With the robot, you don’t save any money on the sensors and you have the added expense of a rover platform to maintain. They certainly have their place, but I don’t see them as general use options.
can’t see this being classified as intrinsically safe, 4-20 current loops on an isolated supply is still the best option
Wouldn’t it be better to use brushless motors? Brushed motors will be good at finding gas leaks, although only once, and it may damage some other equipment as well.