Leave it to engineering students to redefine partying. [Hyun], [Justin], and [Daniel] have done exactly that for their final project by building a virtually-controlled robotic arm that plays beer pong.
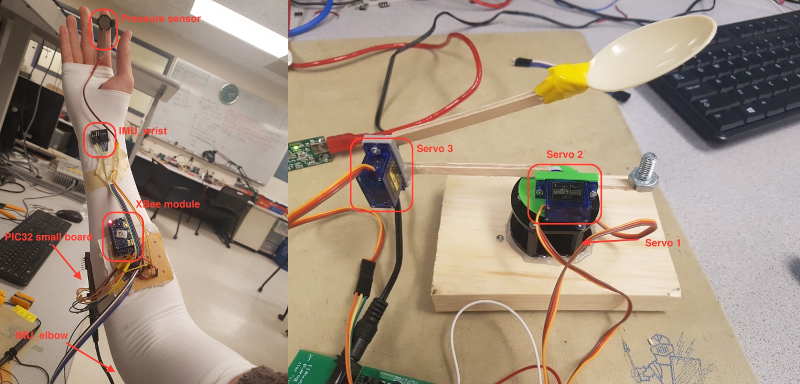
There are two main parts to this build: a sleeve worn by the user, and the robotic arm itself. The sleeve has IMUs at the elbow and wrist and a PIC32 that calculates their respective angles. The sleeve sends angle data to a second PIC32 where it is translated it into PWM signals and sent to the arm.
There’s a pressure sensor wired sleeve-side that’s worn between forefinger and thumb and functions as a release mechanism. You don’t actually have to fling your forearm forward to get the robot to throw, but you can if you want to. The arm itself is built from three micro servos and mounted for stability. The spoon was a compromise. They tried for a while to mimic fingers, but didn’t have enough time to implement grasping and releasing on top of everything else.
Initially, the team wanted wireless communication between the sleeve and the arm. They got it to work with a pair of XBees, but found that RF was only good for short periods of use. Communication is much smoother over UART, which you can see in the video below.
You don’t have to have a machine shop or even a 3-D printer to build a robot arm. Here’s another bot made from scrap wood whose sole purpose is to dunk tea bags.














Ahh to be back in uni again having the time to make weird shit .
I love the pencil keeping everything from touching. Ahh good show :)