With the roughly 20-day wide launch window for the Mars 2020 mission rapidly approaching, the hype train for the next big mission to the Red Planet is really building up steam. And with good reason — the Mars 2020 mission has been in the works for a better part of a decade, and as we reported earlier this year, the rover it’s delivering to the Martian surface, since dubbed Perseverance, will be among the most complex such devices ever fielded.
“Percy” — come on, that nickname’s a natural — is a mobile laboratory, capable of exploring the Martian surface in search of evidence that life ever found a way there, and to do the groundwork needed if we’re ever to go there ourselves. The nuclear-powered rover bristles with scientific instruments, and assuming it survives the “Seven Minutes of Terror” as well as its fraternal twin Curiosity did in 2012, we should start seeing some amazing results come back.
No prior mission to Mars has been better equipped to answer the essential question: “Are we alone?” But no matter how capable Perseverance is, there’s a limit to how much science can be packed into something that costs millions of dollars a kilogram to get to Mars. And so NASA decided to equip Perseverance with the ability to not only collect geological samples, but to package them up and deposit them on the surface of the planet to await a future mission that will pick them up for a return trip to Earth for further study. It’s bold and forward-thinking, and it’s unlike anything that’s ever been tried before. In a lot of ways, Perseverance’s sample handling system is the rover’s raison d’être, and it’s the subject of this deep dive.
Three Robots in One
NASA has done its usual admirable job of communicating with the public about the Mars 2020 mission, and part of the outreach includes this recent video that shows off a little of the engineering that went into the sample handling system. Honestly, though, for as much tech eye candy as that video had, it only served to whet my appetite. There was so much going on that I had to find out more.
To get a bit of the inside story, I turned to Kelly Palm, one of the JPL engineers seen in the video below. As the Integration and Test Lead for the Sample Caching System (SCS), she’s pretty busy these days, but she graciously fielded my questions and helped give me an idea of what went into building and testing such a complex piece of equipment.
First of all, the SCS is really not just one but three separate robots, each with a specific set of jobs. The “business end” of the SCS is the 2-meter-long robot arm mounted to the front of the vehicle. Like Curiosity before it, the arm carries a turret that’s laden with scientific instruments, sensors, and cameras, as well as the tools necessary for boring into Martian rocks and taking samples. But unlike its predecessor, where the rock drill was designed to abrade rocks and produce a powder that could be easily analyzed by onboard instruments, the Perseverance drill is specialized for obtaining core samples, suitable for both on-board study and in terrestrial labs once the samples are returned.
The drill in the robot arm’s turret is a pretty versatile tool. With the help of the bit carousel (more about which is below) the drill can attach bits designed for different jobs. The drill is capable of running in either a simple rotary mode or in a percussive mode, similar to a hammer drill. A small onboard tank of purified nitrogen is used to gently remove dust generated by coring operations.
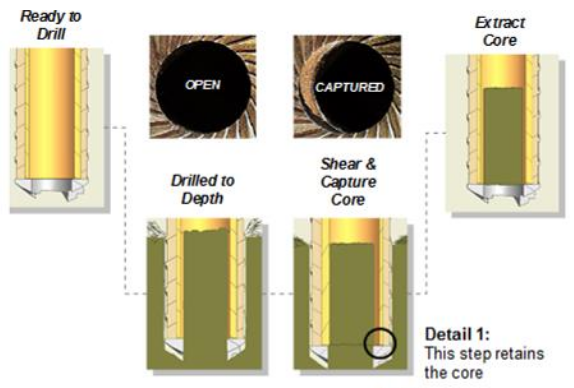
Coring into rock to a limited depth using a cylindrical bit raises a question: how exactly is the core recovered? On Earth, the answer would be to use a second tool to pry at the cylinder of rock left behind after the coring bit is removed. While something like that could certainly work on Mars too, especially with a robotic arm at your disposal, NASA came up with a far more clever system.
According to design tests run by a company called Honeybee Robotics in 2014, liberating the core from the parent rock and enclosing it the sample tube in which it will live until being reopened in a lab on Earth is a one-step process. Nestled inside the coring bit is a titanium sample tube. During coring, the axis of the sample tube and the coring bit are aligned with each other, so that the tube slips over the rock core as drilling proceeds. At the proper depth, the sample tube is rotated slightly off-axis, exerting enough force on the base of the core sample to break it off from the parent rock. The core is retained by a lip on the inside of the coring bit, allowing it to be removed from the hole, already within the titanium sample tube in which it will remain until the sample return mission.
Sealed with a Ram
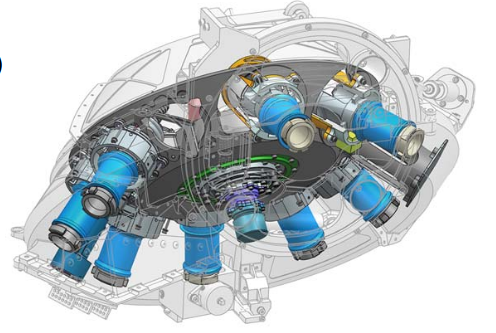
The bit carousel is the next robot in the sample caching process. Sitting at the front of the rover chassis, the bit carousel is outwardly simple — just a rotating turret that transports bits to and from storage in the belly of Perseverance. But what it lacks in complexity is more than made up for by its clever design. The body of the carousel is a wheel with stations around the edge. Each station is at a 45° angle relative to the rotor’s axis, which itself is oriented 45° to the long axis of the chassis. The combination of angles means that a tube can transition from vertical to horizontal just by rotating the carousel with a single motor. There are plenty of sensors and actuators that ensure everything is lined up, of course, but the simplicity of the design is really something.
The ability to transfer tools and samples between horizontal and vertical orientations is critical to the sample caching mission, since the robot that takes care of storing everything lives inside the forward section of the rover’s chassis. The Sample Handling Arm, or SHA, looks a little like the SCARA (selective compliance articulated robot arm) robots that are prevalent in semiconductor fabs. The SHA is capable of accessing multiple locations inside the sample caching compartment and transferring between them and the bit carousel presentation area. To clear the instruments and sample tubes that take up most of the space in the bay, the SHA has an additional Z-axis so that the whole thing can drop below the bottom edge of the rover chassis. In addition to 42 storage silos for core and regolith sample tubes, the SHA can reach storage for a number of tools and attachments, plus instruments for doing some preliminary analysis of the samples, such as volume assessment and imaging.
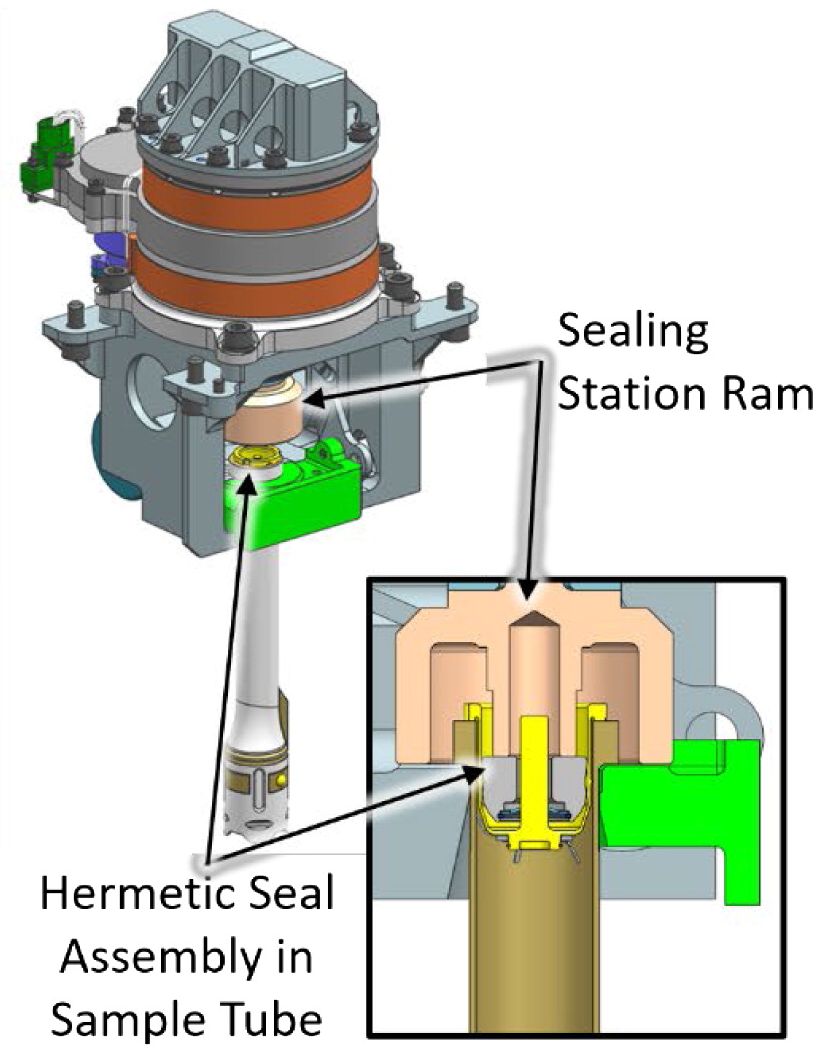
Once a sample tube is filled, it needs to be hermetically sealed to ensure that the contents will survive for an indeterminate amount of time on the Martian surface as well as withstand the rigors of the eventual trip back to Earth. The seal has to be made without contaminating the sample, so no adhesives can be used, and no heat can be used either, lest the sample be subjected to extreme temperatures.
To seal a sample tube, the SHA brings it over to one of seven seal dispensers. A cup-shaped plug is dropped into the open end of the tube by a dispenser. The plugged tube is then moved to a sealing station, which uses a motor-driven ram to drive a tapered ferrule down a guide rod inside of the plug. As the ferrule is pressed downward, the rim of the plug expands, driving a sharp tooth on its outside circumference into the inner wall of the sample tube. The end result is essentially a cold-welded bond between the cap and the sample tube, hermetically sealing the tube and protecting the sample from contamination.
Return to Sender
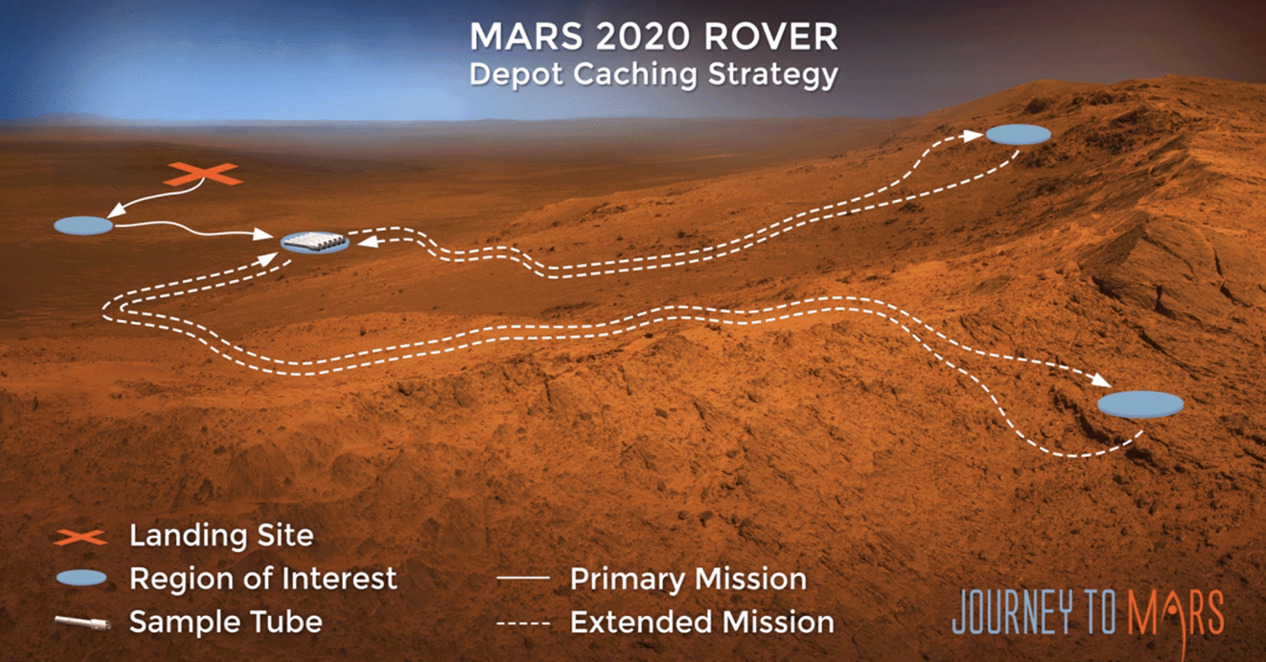
Once a sample has been sealed in its titanium sarcophagus, it’s ready to be deposited onto the Martian surface. Most mission profiles that I could find refer to the use of “depot caching”, where Perseverance repeatedly returns to a single location from various regions of interest to deposit sample tubes. This makes perfect sense; finding a big pile of 42 titanium tubes is probably a far easier task for a future sample recovery mission than roaming about looking for individual tubes dropped where they were taken.
Still, whatever robot is sent to clean up after Perseverance has its work cut out for it; since the SHA cannot reach down to the surface, the tubes will have to be dropped, which means an orderly stack of sample tubes will likely not be what the recovery robot will find. Whatever follows in Perseverance’s tracks is going to need the agility to pick up and safely stow every single precious sample tube regardless of its orientation, possibly after digging it out of wind-blown regolith, and the intelligence to do it all autonomously.
With some luck, Perseverance will soon be on its way to Mars, and both when it launches and when it lands in February, we’ll be glued to our seats waiting for results. We’ll also be following the development of the return mission, which could prove to be even more challenging and require even cooler engineering to pull off.
Featured images: NASA/JPL-Caltech














Thanks for doing the extra research, I always love seeing space exploration articles on HAD!
Neat! Thanks! And Perseverance is now on it’s way and all looks good! Now to see in 6 months or so….
Uhm.. why?
So we currently lack the tech to go collect and return these samples.
Are the rocks in the martian soil going to change substantially between now and the time when we can go collect them?
Any future mission to collect them now has to land “within reach” of these cached samples. I don’t claim to be a rocket scientist, but that seems a _much_ harder task than drilling out a few fresh core samples from wherever you do land that mission.
So, why spend the time, effort, and mass on collecting and caching these samples?
I was thinking the same thing.
Weight. There is room on this mission for just the acquiring step, not the return step.
This. It’s always about mass. A return launch vehicle might not have the mass budget for a drill.
It doesn’t seem too smart. Maybe it’s to validate the performance of the on probe powder analysis at a later date. So we know that method is reliable if we sent a probe somewhere not so easy to get back from like Alpha Centauri.
It’s to protect against future space craft, especially those with humans on board, that might bring Earth microbes to Mars.
These containers will remove the doubt that if we find anything, it was there before we visited.
Or spacecrafts from *Other countries* (e.g. China, UAE) that may not observe the same level of care for not bringing in contaminants onto Mars.
I wouldn’t call them contaminants…. Actually we should be bringing some selected organisms/microbes to Mars that could possibly survive/mutate in certain areas to jump start the terra-forming process…. Let the experiments begin to see if possible to bring a dead world to life! Who knows…. in time…
Seems to me though you should be able to design a portable laboratory to analyze the cores on site. Or at least pick them up and store on board the Rover using something as simple as an electro-magnet for the picker-upper and place in a basket attached to rover…. Then you just have to go to one place (where-ever the rover is) to retrieve down the road. Arm chair quarter backing ….
True, India just bombed the moon with tardigrades.
Exactly. It may well be that the first craft with return capability will be 9m wide and 50m high. Good luck sterilizing that mammoth!
Probably a tacit admission that we won’t be sending Humans to Mars anytime soon (like, say, happy 2200.)
I thought the plan was to send all the rich people ASAP so we can get on with creating a post-greed economy.
Don’t forget its a mobile platform so on top of the other good reasons already mentioned by the time the collection mission arrives the samples will have been hauled a relatively long way for a wider search. At least assuming the rover survives landing and is up to the task. Allowing the sample recovery vehicle to be on the ground a very short time for more efficient flight window and less chance of duststorm etc damaging the workings.
Rover alone is 1,025kg (2,260 freedom units). It needs a skycrane, a heatshield…it’s heavy. Very heavy.
The return mission will not only consist of a rocket that can get the core samples into Mars orbit (just that alone is about 4.1km/s delta-V, so a pretty substantial rocket), but also another spacecraft that it will randervouz with, transfer the payload and head home (another 4-4.5 km/s delta-V). It will also need a heavy heatshield to survive Earth atmosphere reentry.
All of this is multiple TONS of additional weight, that even a fully decked out Delta-V heavy would simply not have the muscle to get to Mars in a single mission, hence a 2nd future mission.
That’s pretty stupid, sending an earth re-entry shield all the way to Mars, leave re-entry vehicle in an orbit that’s easy to dock with.
Re-entry vehicle stays in an orbit around Mars in the version of the sample return mission I’ve read about and it docks with a launch vehicle carrying samples from the surface.
Just in case you mean leaving the reentry vehicle in an orbit around Earth then know that Mars orbit insertion is hard and requires fuel galore that’s why Percy is not going to do it, just like Curiosity didn’t do it. Going back requires similar amount of fuel but breaking at Earth would be almost impossible. The Earth orbit insertion fuel would overweight some heat-shield probably in orders of magnitude.
It also divides the risk. If the drill + seal + depot part fails for any reason, they haven’t spent a huge amount of resources and mass budget of the mission for a useless return rocket. When you know the samples are in a pile already, and can actually see the pile and surrounding area with cameras, planning the details of a return mission are presumably much easier.
Between 1969 and 1972 we landed 6 lunar modules on the surface of the moon. One of those landings ,Apollo 12, landed within 500 feet of the Surveyor 3 spacecraft that had landed on the moon 30 months earlier. Here we are 50 years later with improved technology. Yeah, we can do this!
+1 Dad. And +10 for instilling the love of space exploration in me so many years ago!
I just have this vision of a Percy wandering around “eating” the Martian rocks and then “pooping” along its trail. Than some time later another robot like Rosie from The Jetsons scooting along sweeping Percy’s poop into a dustpan…
Why not just let a manned mission to Mars complete this task? It seems like it will take at least 10 years to get these samples back, which is around when the manned mars mission was planned to happen. A crewed mission already needs to be capable of returning to earth, so it would make sense that they would collect samples while there.