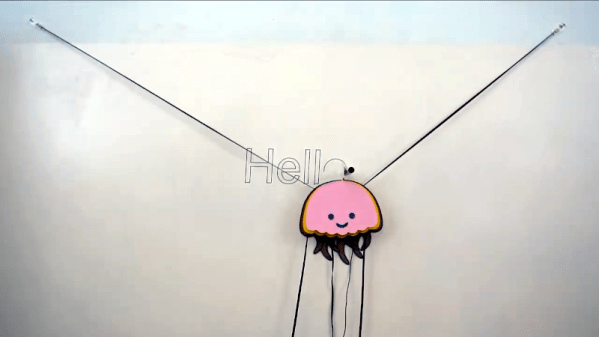
If you’ve ever wanted to build a large format plotter but didn’t have the floor space, maybe put it up against the wall and make it cute. That’s the idea behind Fumik, the wall-drawing robot. As you might expect, the little device is just a motion base with a pen. We hope there’s paper against the wall since not everyone wants computer-generated art on their drywall.
The maximum size is apparently 5 m wide by 3 m tall, plenty of room to express yourself. The controller is an Arduino Mega, and stepper motors with a CNC shield drive the whole assembly. Interestingly, the motor and electronics are all onboard the jellyfish itself, rather than the wall.
The device only holds one pen at a time, but you can draw with one color and then manually change the pen. The files on GitHub are good, but you’ll need to intuit some of the mechanics from the videos. However, since it uses off-the-shelf hardware, it should be pretty easy to figure it out. This looks like a cheap and cheerful wall plotter, and the results speak for themselves.
Traditionally, when it comes to high-tech self-assembling microscopic structures for use in medicine delivery, and refined, delicate grippers for robotics, there’s been a dearth of effective, economical options. While some options exist, they are rarely as effective as desired, with microscopic medicine delivery mechanisms, for example, not having the optimal porosity. Similarly, in so-called soft robotics, many compromises had to be made.
A promising technology here involves the manipulation of flat structures in a way that enables them to either auto-assemble into 3D structures, or to non-destructively transform into 3D structures with specific features such as grippers that might be useful in both micro- and macroscopic applications, including robotics.
Perhaps the most interesting part is how much of these technologies borrow from the Japanese art of origami, and the related kirigami.
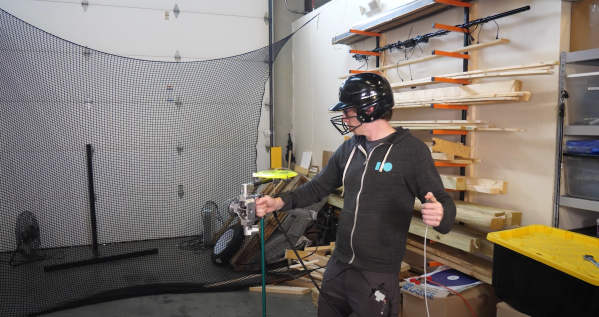
If you’ve gone to a local city park lately, you might have noticed strange metal baskets on poles with chains dangling free. These baskets are spread out throughout the park seemingly at random. For the uninitiated, Frisbee golf (sometimes known as disc golf) is a confusing concept. You might not think it, but Frisbee golf can be a very big deal to some people. [Stuff Made Here] is back with a disc launcher that he hopes will put all the disc golfers to shame.
It’s no secret that we here at Hackaday are big fans of [Stuff Made Here], or [Shane] (he has his own tag after all), and for obvious reasons — the CAD design process, the careful machining and testing, and the extremely high bar that [Shane] sets for his projects. This one is no different, and it is a tale of iteration and scaling. He started out with a simple goal: break the speed record for a thrown Frisbee.
An initial design was decided upon based on high-pressure air pushing a piston to throw the Frisbee off of an arm. Initially, the arm was way too slow as the airflow was severely restricted due to air solenoids and pressure regulators. After fixing all those problems by fabricating his own solenoid and adding a secondary tank with no regulator, the arm started really moving. However, [Shane] wanted it to be able to be arm-mounted, so making sure the torque wouldn’t melt his arm bones was an important priority.
A counterbalance was added to cancel it out, but that ended up causing additional problems down the road, so the throwing arm had to be made as light as possible. The gripper mechanism had to be redesigned again and again as each time the speed was increased, a new problem arose. Turns out that small plastic discs being accelerated at many G’s tend to deform and slip out of their holders, no matter how well engineered. So [Shane] switched to a clever new design to pull the Frisbee along rather than push. It was too dangerous to really be handheld, and the only tests while he was wearing it were at very low amounts of pressure and power.
Testing it in a wide-open field at full power showed promise and while he had plenty of speed, he wasn’t able to beat the distance record. Breaking the distance record is much harder as Frisbees aren’t really designed with the sheer acceleration that [Shane] is subjecting them to, and they want to flip. Additionally, the Frisbees are lacking the spin that would keep them more stable, and what we do as humans is quite difficult to reproduce. Maybe a larger-scale version of this disc launcher could be made that accepts Frisbees?
It’s incredible to watch this contraption come together as each part needs to be designed and machined first by [Shane]. Video after the break.
Often used to make rugs, tufting is a process wherein a hollow needle is used to cram thread or yarn into fabric in some kind of pattern. This can be done by hand, with a gun, or with big machines. Some machines are set up to punch the same pattern quickly over and over again, and these are difficult to retool for a new pattern. Others are made to poke arbitrary patterns and change easily, but these machines move more slowly.
This robotic tufting system by [Owen Trueblood] is of the slow and arbitrary type. It will consist of a modified tufting gun strapped to a robot arm for CNC textile art. Tufting guns are manufactured with simple controls — a power switch, a knob to set the speed, and a trigger button to do the tufting. Once it’s affixed to the robot arm, [Owen] wants to remote control the thing.
The gun’s motor driver is nothing fancy, just a 555 using PWM to control a half H-bridge based on input from the speed control potentiometer. [Owen] replaced the motor controller with an Arduino and added an I/O port. The latter is a 3.5 mm stereo audio jack wired to GND and two of the Arduino’s pins. One is a digital input to power the gun, and the other is used as an analog speed controller based on input voltage. [Owen] is just getting started, and we’re excited to keep tabs on this project as the gun goes robotic.
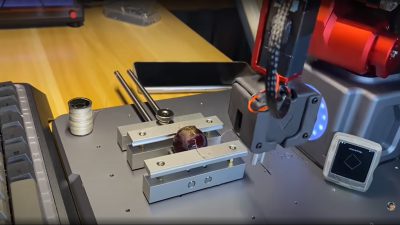
This week Hackaday Editor-in-Chief Elliot Williams and Managing Editor Tom Nardi look at the week’s most interesting stories and projects, starting with the dystopian news that several people have had their bionic eye implants turn off without warning. We then pivot into an only slightly less depressing discussion about the poor security of Apple’s AirTags network and how it can be used to track individuals without their knowledge. But it’s not all doom and gloom. We’ll look at new projects designed to push the envelope of desktop 3D printing, and marvel at a DIY robotic arm build so accurate that it can put stitches in the skin of a grape. You’ll also hear about the surprisingly low cost of homebrew hydrophones, the uncomfortable chemistry behind wintergreen, and an early portable computer that looks like it came from Hogwarts School of Witchcraft and Wizardry.
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!
[Zhihui Jun] is a name you’re going to want to remember because this Chinese maker has created quite probably one of the most complete open-source robot arms (video in Chinese with subtitles, embedded below) we’ve ever seen. This project has to be seen to be believed. Every aspect of the design from concept, mechanical CAD, electronics design and software covering embedded, 3D GUI, and so on, is the work of one maker, in just their spare time! Sound like we’re talking it up too much? Just watch the video and try to keep up!
After an initial review of toy robots versus more industrial units, it was quickly decided that servos weren’t going to cut it – too little torque and lacking in precision. BLDC motors offer great precision and torque when paired with a good controller, but they are tricky to make small enough, so an off-the-shelf compact harmonic drive was selected and paired with a stepper motor to get the required performance. This was multiplied by six and dropped into some slick CNC machined aluminum parts to complete the mechanics. A custom closed-loop stepper controller mounts directly to the rear of each motor. That’s really nice too.
Stepper controller mounts on the motor rear – smart!
Control electronics are based around the STM32 using an ESP32 for Wi-Fi connectivity, but the pace of the video is so fast it’s hard to keep up with how much of the design operates. There is a brief mention that the controller runs the LiteOS kernel for Harmony OS, but no details we can find. The project GitHub has many of the gory details to pore over perhaps a bit light in places but the promise is made to expand that. For remote control, there’s a BLE-connected teaching device (called ‘Peak’) with a touch screen, again details pending. Oh, did we mention there’s a force-feedback (a PS5 Adaptive Trigger had to die for the cause) remote control unit that uses binocular cameras to track motion, with an AHRS setup giving orientation and that all this is powered by a Huawei Atlas edge AI processing system? This was greatly glossed over in the video like it was just some side-note not worth talking about. We hope details of that get made public soon!
Threading a needle through a grape by remote control
The dedicated GUI, written in what looks like Unity, allows robot programming and motion planning, but since those harmonic drives are back-drivable, the robot can be moved by hand and record movements for replaying later. Some work with AR has been started, but that looks like early in the process, the features just keep on coming!
Quite frankly there is so much happening that it’s hard to summarise here and do the project any sort of justice, so to that end we suggest popping over to YT and taking a look for yourselves.
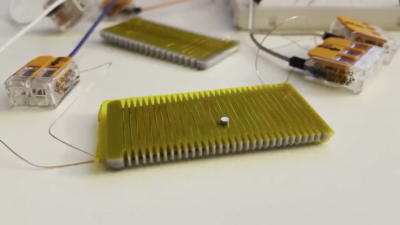
[Kevin Lynagh] is interested in tiny PCB stepper motors, and after reviewing the various projects and patents to-date, decided to give it a try himself. These are basically a stepper motor that’s been unrolled and made flat — traces on the PCB act as the coils and tiny magnetic “robots” act as the rotor.
If you want to try this concept yourself, [Kevin]’s post contains an excellent survey of prior art and projects, as well as exploring the theory behind how these things work. He has taken a deep dive in to the theory, deep enough to grasp what’s going on and to build some preliminary prototypes with a bit of confidence. First off was just a hand-wound flat coil as a proof-of-concept. Next was a PCB version that worked almost exactly as planned, although he confesses to burning out a motor driver circuit before stepping back and making some calculations.