Interested in playing with ultra-wideband (UWB)? [Jaryd] recently put together a fairly comprehensive getting started guide featuring the AI Thinker BU03 that looks like a great place to start. These modules can be used to determine distance between two of them to an accuracy in the order of 10 centimeters, and they can do so in any orientation and with obstacles in the line of sight. It is possible to create a network of these UWB modules to get multiple distance measurements at once and enable real-time 3D tracking for your project.
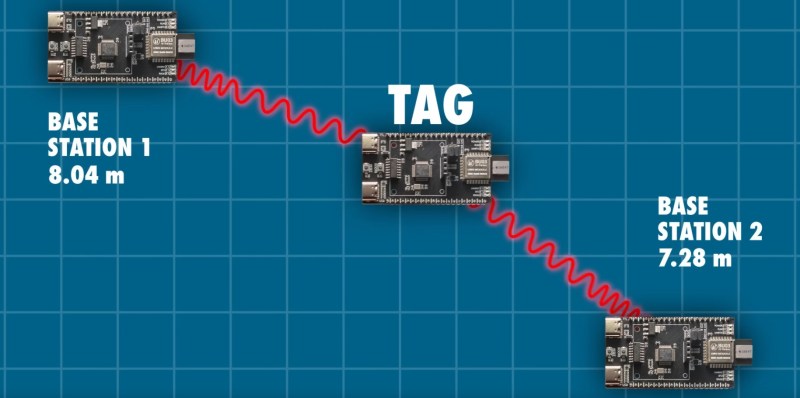
[Jaryd] gathers up nine UWB modules and uses a Raspberry Pi Pico for command and control purposes. He explains how to nominate the “tag” (the device being tracked) and the “base stations” (which help in locating the tag). He reports having success at distances of up to about 10 meters and in favorable circumstances all the way up to as much as 30 meters.
If you don’t know anything about UWB and would like a primer on the technology be sure to check out What Is Ultra Wideband?














in FiRa UWB spec the “base stations” are called anchors.
And add-on cards are being called “hats” and other dumb stuff like that. Why can’t we call them what they are? Oh right.
Because they are anchors and are not giving service. They do not move, device is moving. In UWB there are TDoA modes: uplink and downlink. In downlink anchor provides a service, and you calculate your position. In uplink tdoa your device provides a service with position calculated based on anchor receptions by some other device. That is why anchor =/= base station. Do you call GPS satellite a base station? No base stations for GPS are located on Earth. And satellites are called “GPS space segment”. And position is calculated on your device.
There are standards, and we should use names provided by standards, otherwise we create another standard. You recall XKCD comic about thst, right?
I never seen a standard where “hat” is called – it is “common name” given by community.
You aren’t even correct it seems, the entire block of GPS sats are called the ‘space segment’ and the stations on Earth adjusting them the ‘control segment’ and the receivers we use the ‘user segment’
I guess we don´´t have the same definition of affordable. Those modules costs around 30USD a pop (not including TACO tariffs if applicable, or not, who knows, maybe)
So playing with those is at least over 100USD.
There are other brands and models available, but they all are minimum 25USD (for the tags only)
So, I’ll pass on those and wait another 5 years that they become dirt cheap and widely used.
I agree, that thing is not cheap. But the Chip used is not cheap. Even ordering 10k of them, you pay >5$ per piece. With an additional MCU, board, development and everything, 30$ is a reasonable price for what you get.
But yes, outside my comfort zone as well.
The chip at the heart of this is made by Quorvo, who acquired the technology when they bought Decawave in 2020. Ive no experience with the newer chips but decawave’s DW1000 chip was incorporated into Crazyflie drones a decade ago with excellent results.
Are there any cheaper options to provide high precision localization with range ~50 m?
Can this technique monitor more than one tag at-a-time?
If you want to locate a ton of stationary objects within a space, three base stations can simultaneously track up to 11000 tags. If you want fast accurate position data of moving objects youll want to keep the number relatively small as the speed at which the locations can update is linearly proportional to the number of tags.
That depends on what mode you are using. there is TWR (two way ranging) which has an active communication between the anchros and tags, but if you use TDoA (time difference of arrival) you have more a setup akin to gps and then the count af tags doesn’t matter
But in TDoA the tag knows it’s position but if you want to know it from the outside, you have to communicate it still. So it depends a bit on the usecase
Have worked a bit with the previously mentioned DW1000 on the Crazyflie drones to create a self-deploying indoor localization system :D
https://sintef.brage.unit.no/sintef-xmlui/bitstream/handle/11250/3034458/Natter_2022_An_incrementally_deployed_AAM.pdf
there are two modes of TDoA defined and implemented in FiRa UWB spec: Downlink and uplink. In downlink – you, the tag knows the position against anchors, in uplink the anchor-based system with the server, knows your position.
as @Kaiser mentioned, UWB Fira has a specification for TDoA and the OP should use that for his goal. As I know DW3220 is fully FiRa compliant and provides the necessary commands to build anchor-tag system.
DW3000 series are transceivers, they have no CPU and providesno commands. It’s true it’s FiRa compliant, but on radio level. The key part of FiRa spec is the MAC layer, which needs to be implemented on CPU. The standard is not open, so I wouldn’t expect you will find any source for that.
So, are there any possibilities to combine this with GPS to get better location capabilities