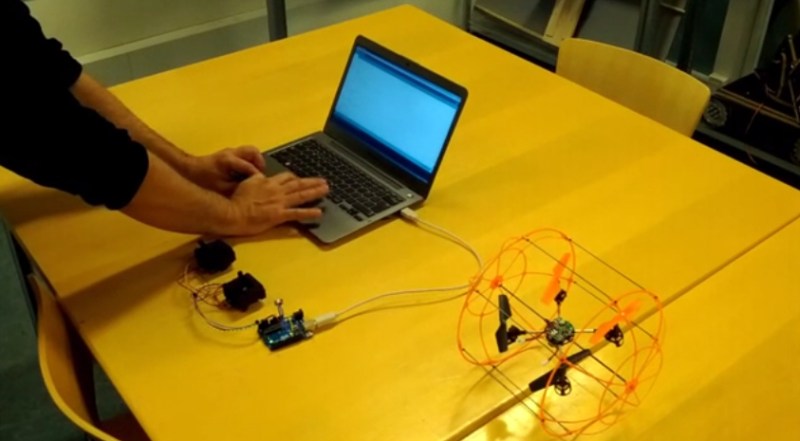
Building your own quadcopter is an expensive and delicate ordeal. Only after you navigate a slew of different project builds do you feel confident enough to start buying parts, and the investment may not be worth your effort if your goal is to jump right into some hacking. Fortunately, [Dzl] has a shortcut for us; he reverse engineered the communication protocol for a cheap toy quadcopter to work with an Arduino.
The cheap toy in question is this one from Hobbyking, which you can see flying around in their product demonstration video. [Dzl] cracked open the accompanying control handset to discover which transceiver it used, then found the relevant datasheet and worked out all the pin configuration involved in the SPI communication. Flying data is transmitted as 8 byte packets sent every 20 mS, controlling the throttle, yaw, pitch and roll.
[Dzl] took the build a step further, writing an Arduino library (direct Dropbox download link) that should catch you up to speed and allow you to skip straight to the fun part: hacking and experimenting! See his quick video after the break, then convince yourself you need a quadcopter by watching this one save its creator, [Paul], the trouble of walking his son to the bus stop.















The RF modules used are quite similar to Nordic Semiconductor’s NRF24L01 RF modules and there are already a lot of readily available Arduino libraries for them.
not just similar…a complete clone :)
I bet if you were to take that cage off the battery would last MUCH longer. The small helicopters I have had always flew noticeably longer when body panels were removed.
I might just have to get one of those, only $30!
I was thinking the same thing but it looks like they’re backordered as they list negative 17 in stock. I was trying to think of a cheap, light weight wireless camera that could be swapped out for the protective frame. Anyone have suggestions?
I built a tiny backpack for the hubsan x4 using an arudino pro mini, an ebay rf tx, an hmc5883l and the tiny gps from sparkfun… It hijacks the control, replacing the remote and acts like an autonavigation device..
Info I got from here
http://www.rcgroups.com/forums/showthread.php?t=1773853
Get the rf unit from here
http://dx.com/p/xl7105-sy-diy-2-4ghz-a7105-nrf24l01-wireless-module-for-arduino-green-2-pcs-149253
or here…
http://www.ebay.com/sch/i.html?_trksid=p2050601.m570.l1313.TR11.TRC1.A0.XNRF24L01+&_nkw=NRF24L01+&_sacat=0&_from=R40
get the x4 and spare parts from here
http://www.ebay.com/sch/i.html?_trksid=p2050601.m570.l1313.TR12.TRC2.A0.Xhubsan+x4&_nkw=hubsan+x4&_sacat=0&_from=R40
I’d be happy to share design an code for whoever is interested…
I even came up with a little laser scanner for obstacle detection…using sparkfun’s laser card https://www.sparkfun.com/products/594 and the wii remote camera… http://www.instructables.com/id/Wii-Remote-IR-Camera-Hack/
Battery life and weight are major concerns…
Forgot… get the gps here… https://www.sparkfun.com/products/11571
There is always interest for working AUVs, just post on github or something like that. What range are you getting while flying?
Hi passerby,
Please share your design and code for your project. @EmanuelStanciu please.
Regards,
Emanuel
Hi passerby,
Could you please email me the code and design, as i am interested in implementing quads for stuff like autonomous navigation, but for personal projects i keep a low budget, so could i please have code and design please (including laser scanner)?
THANK YOU SO MUCH!!!
Sorry Passerby:( my email is bobthepie97@gmail.com
thank you
Sir, I am doing ardiuno controlled quadcopter as my Final Year Project of ELECTRICAL Engineering … Can you help me out how to start and proceed. I will highly appreciate that …